
水下检测机器人
——
控制设计
摘要
本文设计了以Arduino为开发平台的控制系统,建立了以ATMEGA2560为主控芯片,STM32F103RCT6为从控芯片的水下检测机器人,同时配备了树莓4B硬件平台。水下机器人嵌入式系统的控制方案是基于Arduino开放平台设计的,依托水下机器人的自主检测模式和遥控检测模式,实现水下检测机器人在水下的稳定运行。
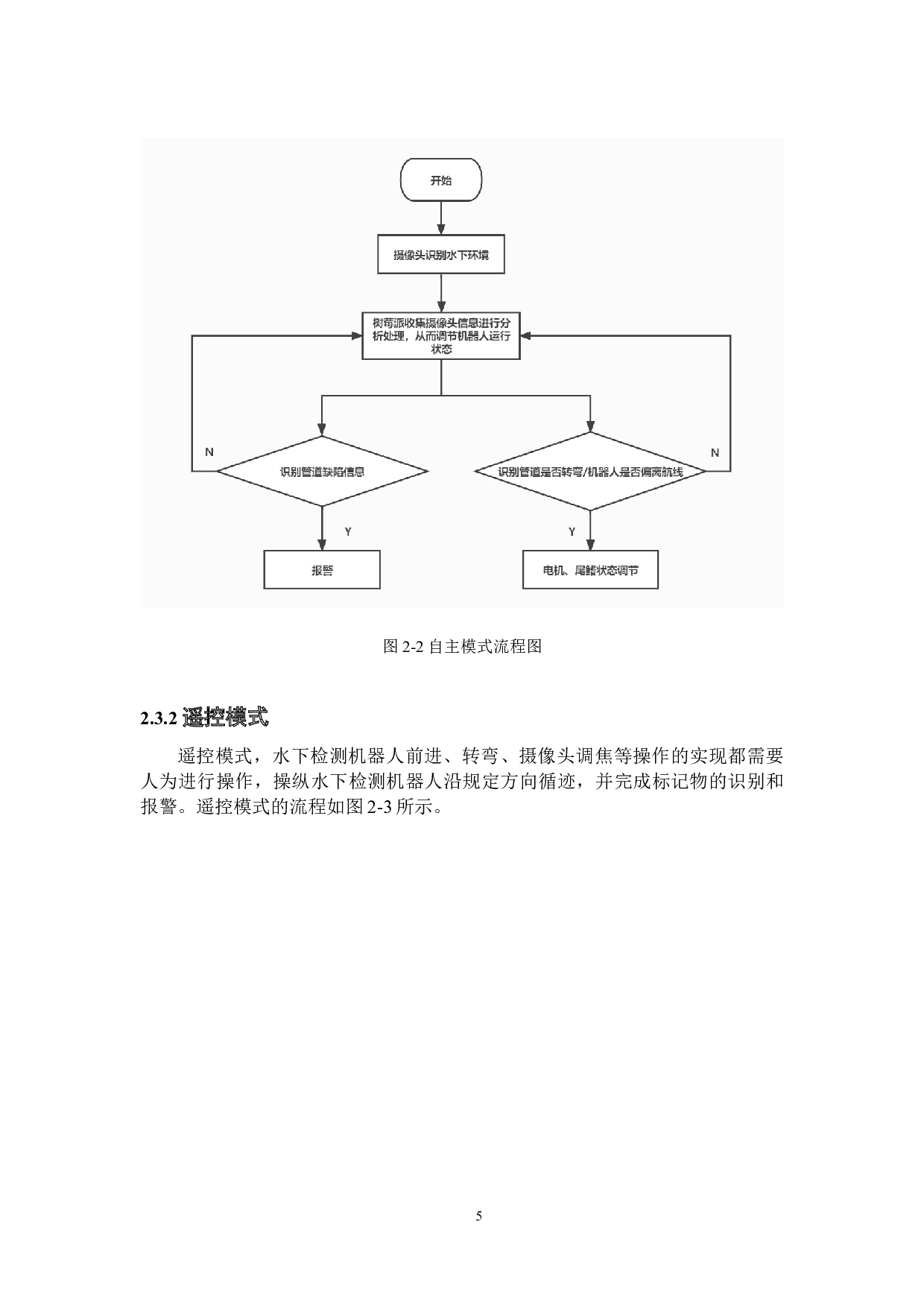
树莓4B系统中使用OpenCV来处理摄像头采集的图像信息,并将处理后的数据通过串行通信发送到控制芯片。在自主模式下,ATMEGA2560控制芯片分析处理数据并驱动无刷电机和尾鳍,使机器人
在水中自主巡线
,STM3
水下检测机器人——控制设计-18421字.docx