

四足步行机器人——软件设计
摘要
本课题组设计了一种四足步行机器人,包括四足机器人机械结构、电路设计和软件设计,本人负责软件部分的设计。
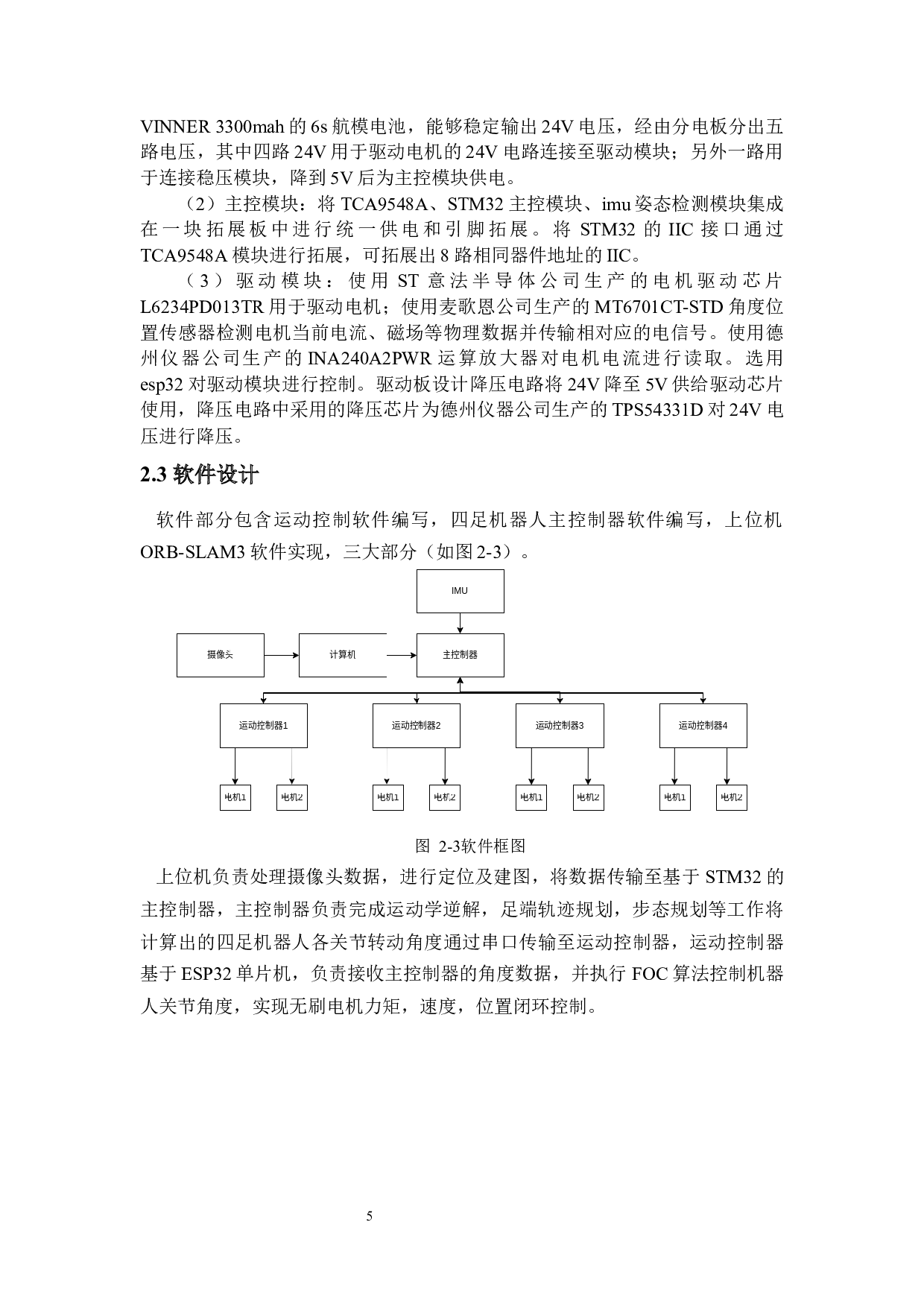
本设计采用有感(FOC)算法建立电机控制模型,通过仿真验证模型的可行性,利用ESP32单片机完成了无刷电机力矩,速度,位置闭环控制。使用几何法分析四足机器人运动学逆解,建立四足机器人运动学逆解模型,完成了机器人足端运动控制。采用摆线方程完成四足机器人足端轨迹规划,结合运动学逆解模型与足端轨迹规划进行仿真验证了运动学控制模型。基于STM32单片机实现Trot,Walk等四足步态运动。结合
四足步行机器人——软件设计-15281字.docx