

北京理工大学珠海学院本科生毕业设计(论文)
with
different
blades
will
be
presented,
so
that
cooperation
of
the
results
in
the
different
rotation
conditions
provides
the
basis
for
improvements
of
sucker
structure.
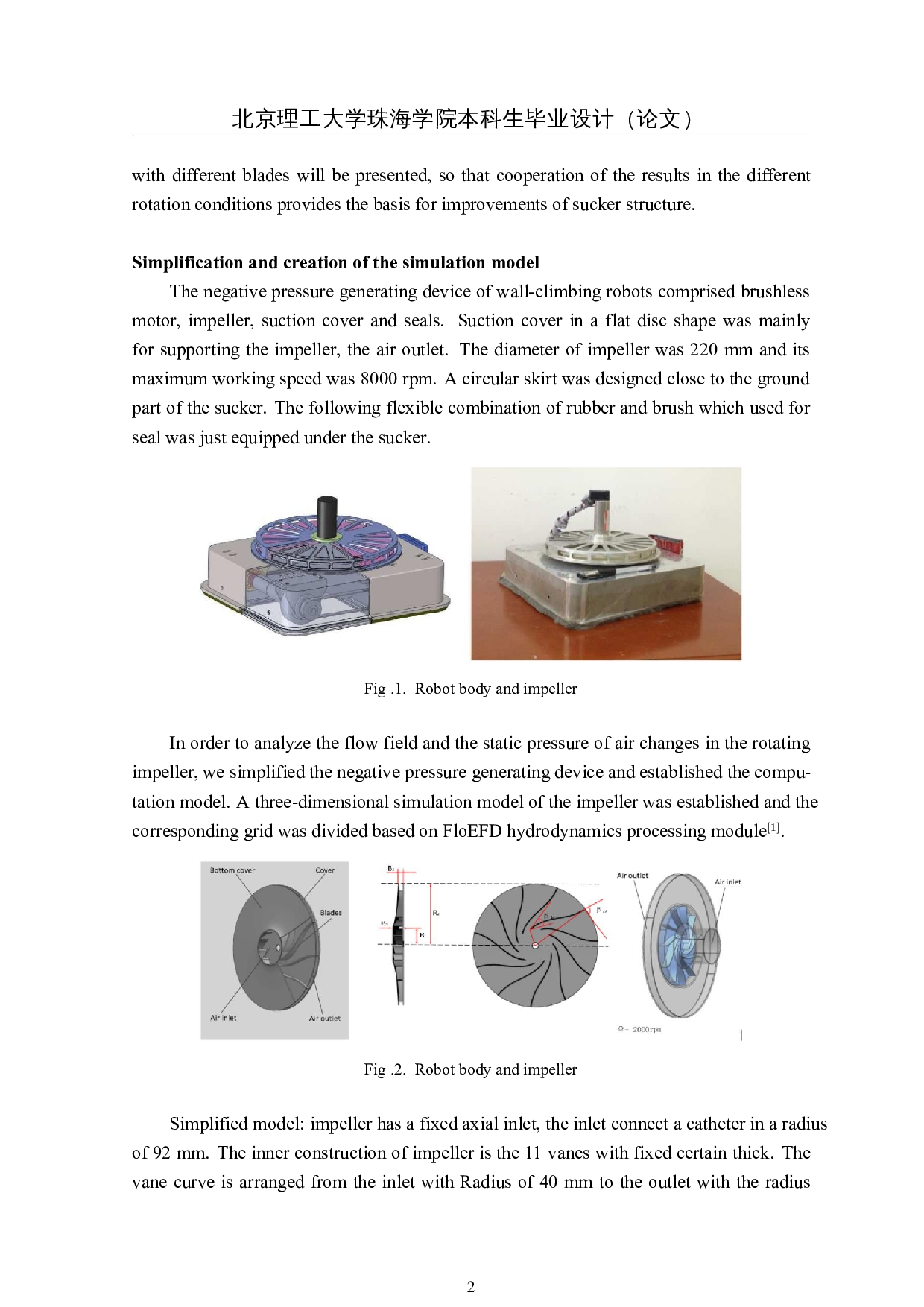
Simplification
and
creation
of
the
simulation
model
The
negative
pressure
generating
device
of
wall-climbing
robots
comprised
brushless
motor,
impeller,
suction
cover
and
seals.
Suction
cover
i
爬壁机器人吸附原理的流场和静压分析-3846字.docx