
北京理工大学珠海学院本科生毕业设计(论文)
仿生六足勘探机器人——控制系统设计
摘要
随着科技的发展,机器人悄然走入我们的视野,为我们的生活提供各样的帮助。
其中六足机器人有着优于其他机器人的复杂地形应对能力,适合作为勘探工具来应
用。因此设计这样一款针对勘探作用的六足机器人的控制系统。在此次设计中,从
需求的角度阐述实现六足机器人控制系统的设计所需的的部分,实现六足机器人行
走的控制系统所需的模块,以及各功能模块的具体任务,本文详细描述了实现各模
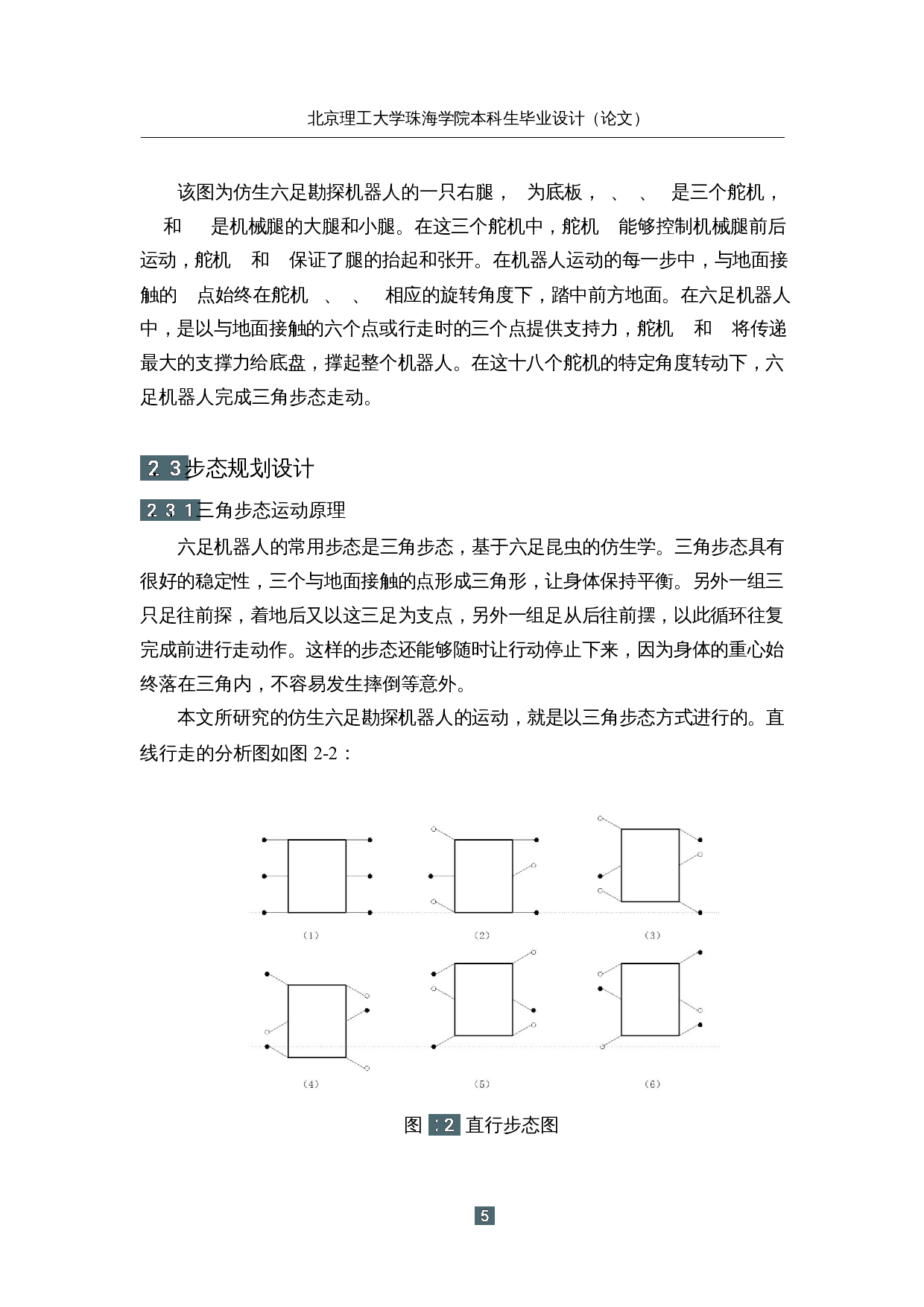
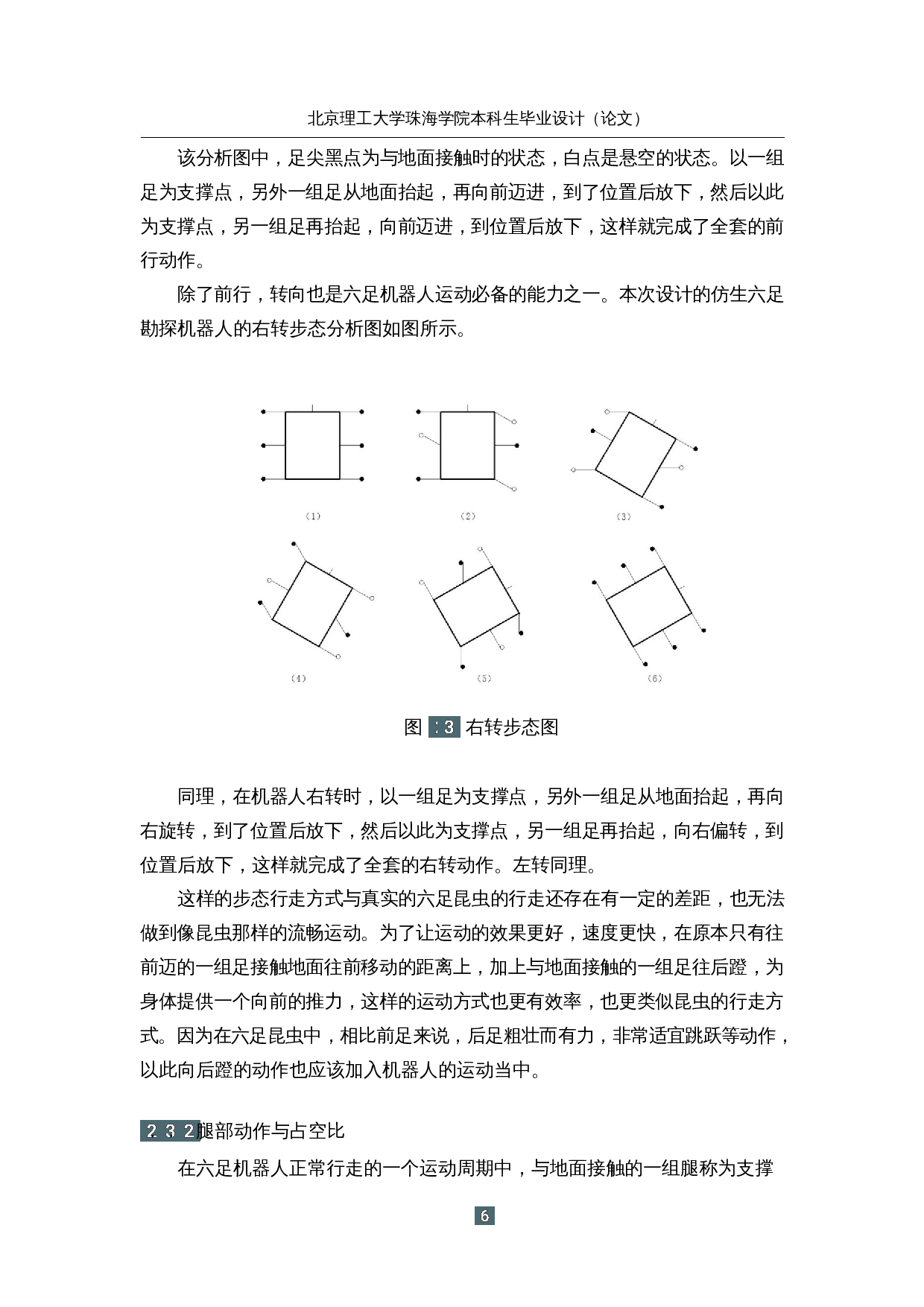
块任务的具体过程。例如步态规划、硬件选取、运动学分析和
仿生六足勘探机器人——控制系统设计-14866字.docx