
基于R
OS
系统的蜂群无人机
—控制程序设计
摘要
蜂群无人机室外飞行导航主要是基于
G
NSS/SINS
组合导航,但在卫星导航信号薄弱的复杂室内环境,仍然无法对无人机群精准定位,因此提出一种基于超宽带(
Ultra Wide Band
,
U
WB
)
定位技术的室内导航定位系统方案,利用外部定位的形式获取无人机群的位置关系信息,再通过串口通信获取数据消息;且可在可视化软件中直观地观察到各架无人机的准确位置。
每架多传感器融合的无人机上除了有飞控处理器和
U
WB
定位模块外还搭载一台机载处理器树莓派,机载处理器均装好
R
OS
机器人操作系统,
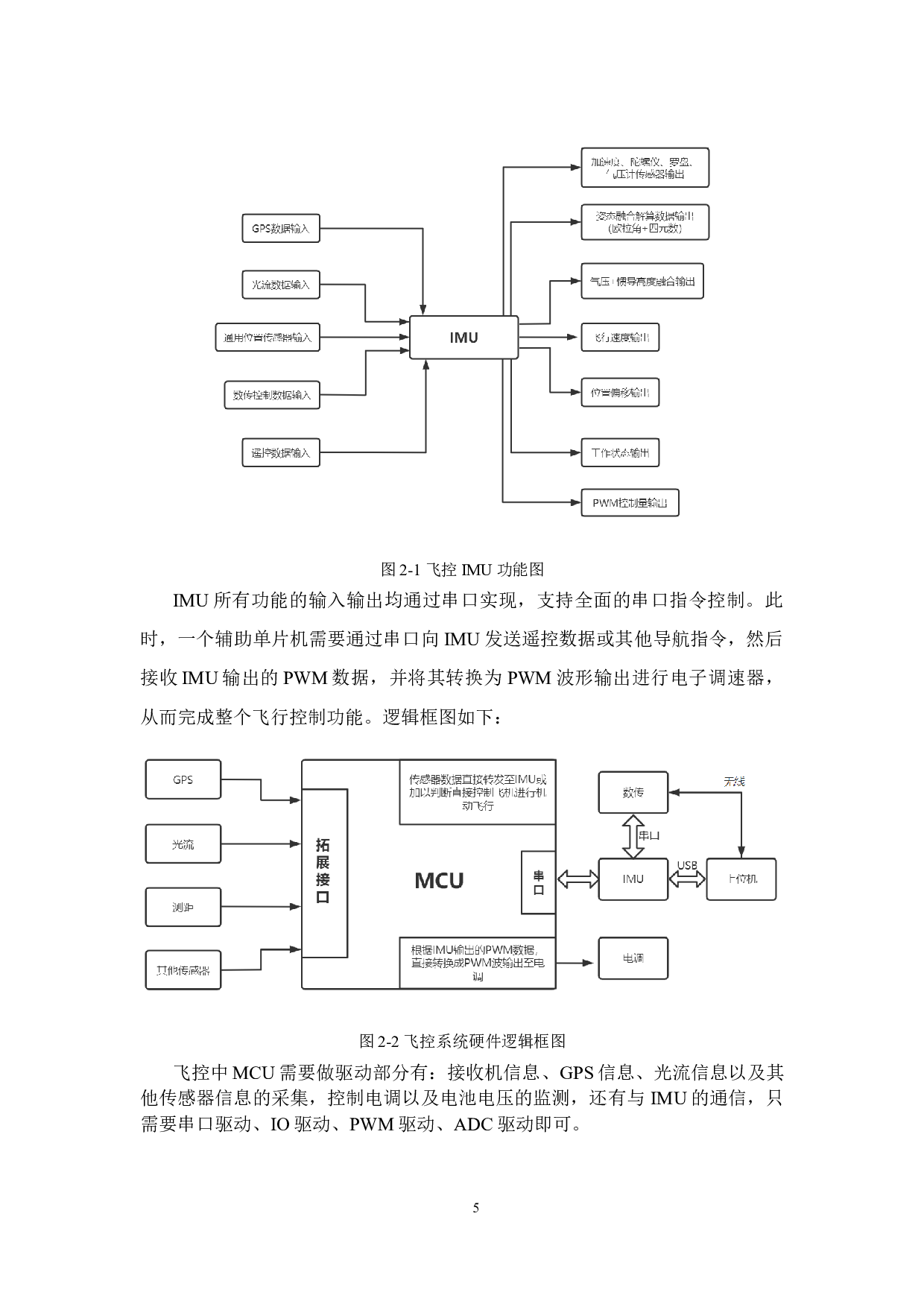
基于ROS系统的蜂群无人机——控制程序设计-18593字.docx