
基于视觉控制的
足轮两式
机器人
硬件电路与控制系统设计
摘 要
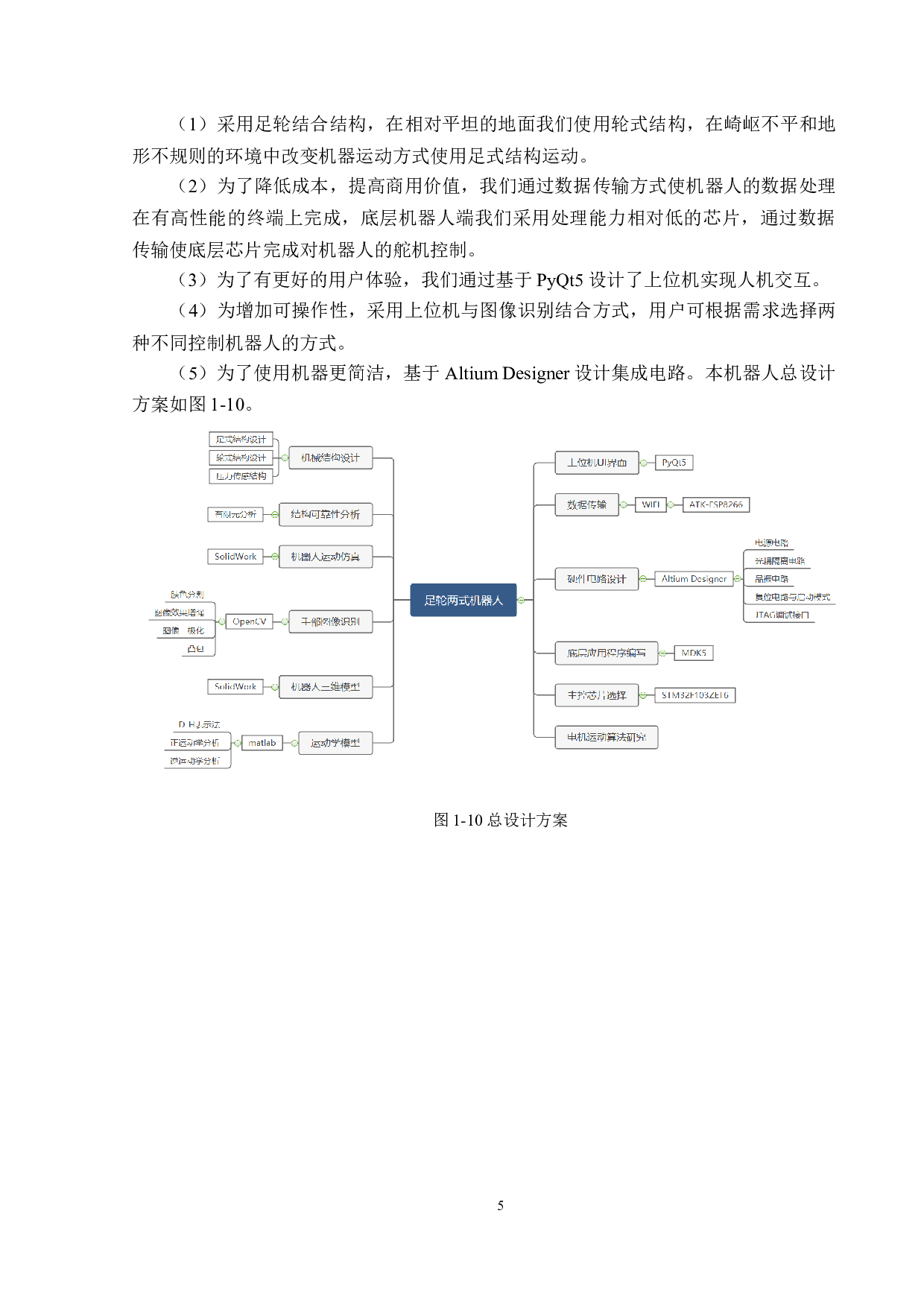
随着人类社会的进步,人类对自然界的探索范围的不断扩大,人们发明了各种各样的机器人来替代人类去完成一些相对危险的工作或难以解决的问题。其中机器人常用的远距离移动方式有三种,分别是轮式、履带式、足式,并且各有其优缺点。
(1)轮式机器人在平坦的道路上可以快速行走,但在相对泥泞与崎岖的复杂地形却难以行进,且其转弯半径大,转弯效率差,灵活性较差。
(2)履带式机器人相比于传统轮式机器人,能够在泥泞与崎岖的复杂地形行进,还可以原地转弯,但当其遇到
基于视觉控制的足轮两式机器人设计与研究硬件电路与控制系统设计-14549字.docx