




摘 要
智能焊接机器人则作为人工焊接的代替,拥有着更加高的精准度和更高的效率,智能焊接机器人实现自动焊接,首先要解决工件中焊缝的自动提取,本文以基于光学图像的钢构智能焊接机器人焊缝提取方法为研究对象,主要从以下几个方面展开研究:
首先,通过查阅文献,在归纳总结国内外研究现状的基础上,对课题研究内容及结构进行按排;然后,对传统边缘检测算子
Robert算子、prewitt算子、sobel算子,canny算子的
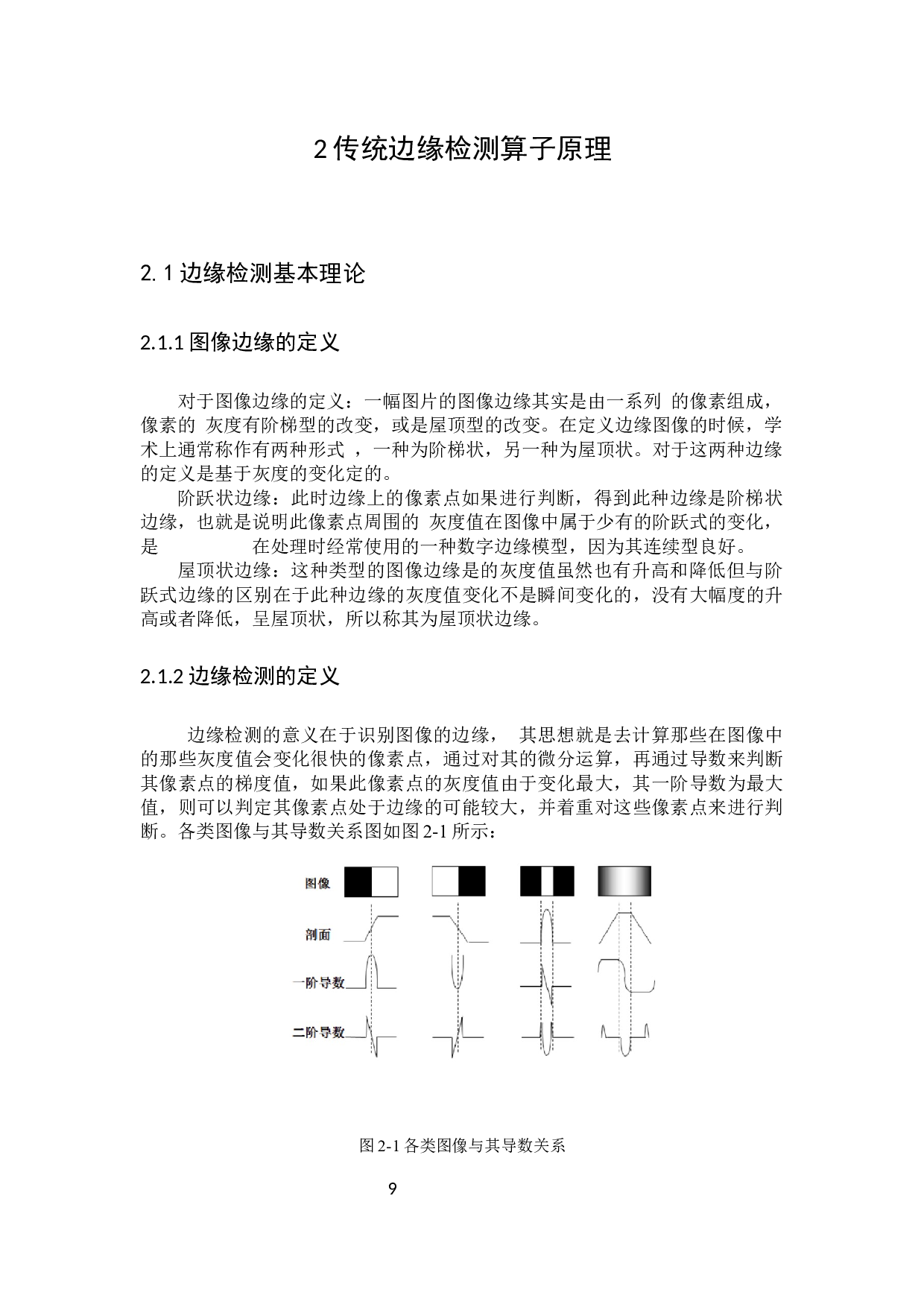
原理进行阐述及比较,并从理论角度角度分析了canny算子能够标识出尽可能多的实际边缘,同时尽可能的减少噪声产生的误报的原
基于光学图像的钢构智能焊接机器人焊缝提取方法-14965字.docx