

Abstract
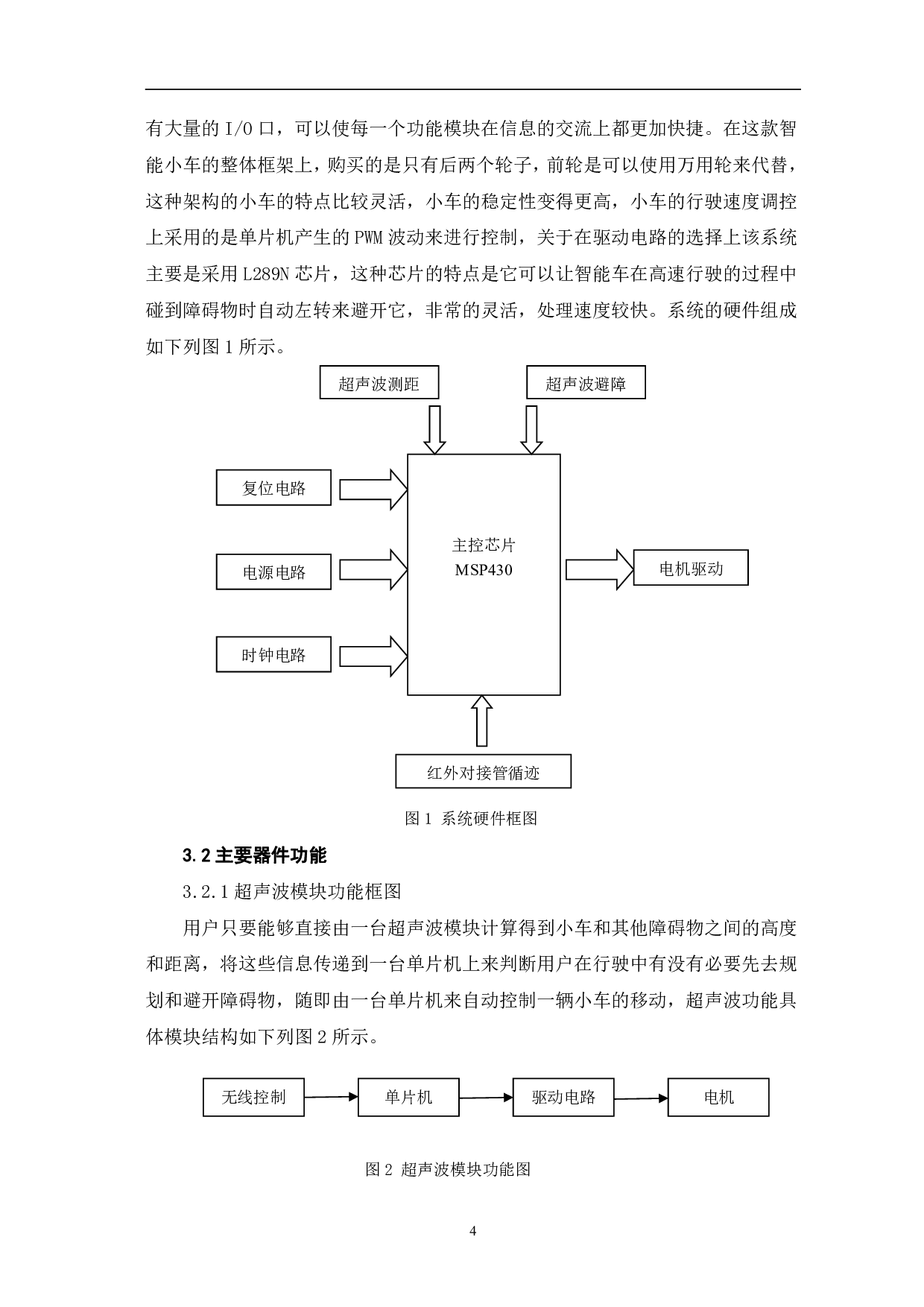
TheprojectusesMSP430asthemaincontrollerandL298Nasthecircuitdriver
chiptomaketheintelligentcarautomaticallyturnleftwhenencounteringobstaclesin
theprocessofdrivingtoavoidit.Theinfrareddeviceisusedtochecktheblackand
whitelines,andtheultrasonicwaveisusedtorealizethecorrespondingfunctionsof
rangingandobstacleavoidance.Thesupercapacitordeviceisselectedtorealize
wirelesscharging,Accordingtotherequirementofreliablehardware,thereal-time
motioncontrolofthevehicleisrealized.Thecontrolprincipleisin
基于MSP430的无线充电循迹小车设计-8761字.pdf