
本科毕业
设计
基于Leap Motion的仿生机械臂系统设计
学院
机电工程学院
专业
测控技术与仪器
年级班别
2
018级(2)班
学号
3
118000155
学生姓名
麦皓彬
指导教师
姬靖
20
2
2
年
6
月
目录
1
绪论
1
1.1
研究背景及意义
1
1.2
国内外研究现状
3
1.3
研究内容
4
1.4
论文结构
5
2 系统结构总体设计
6
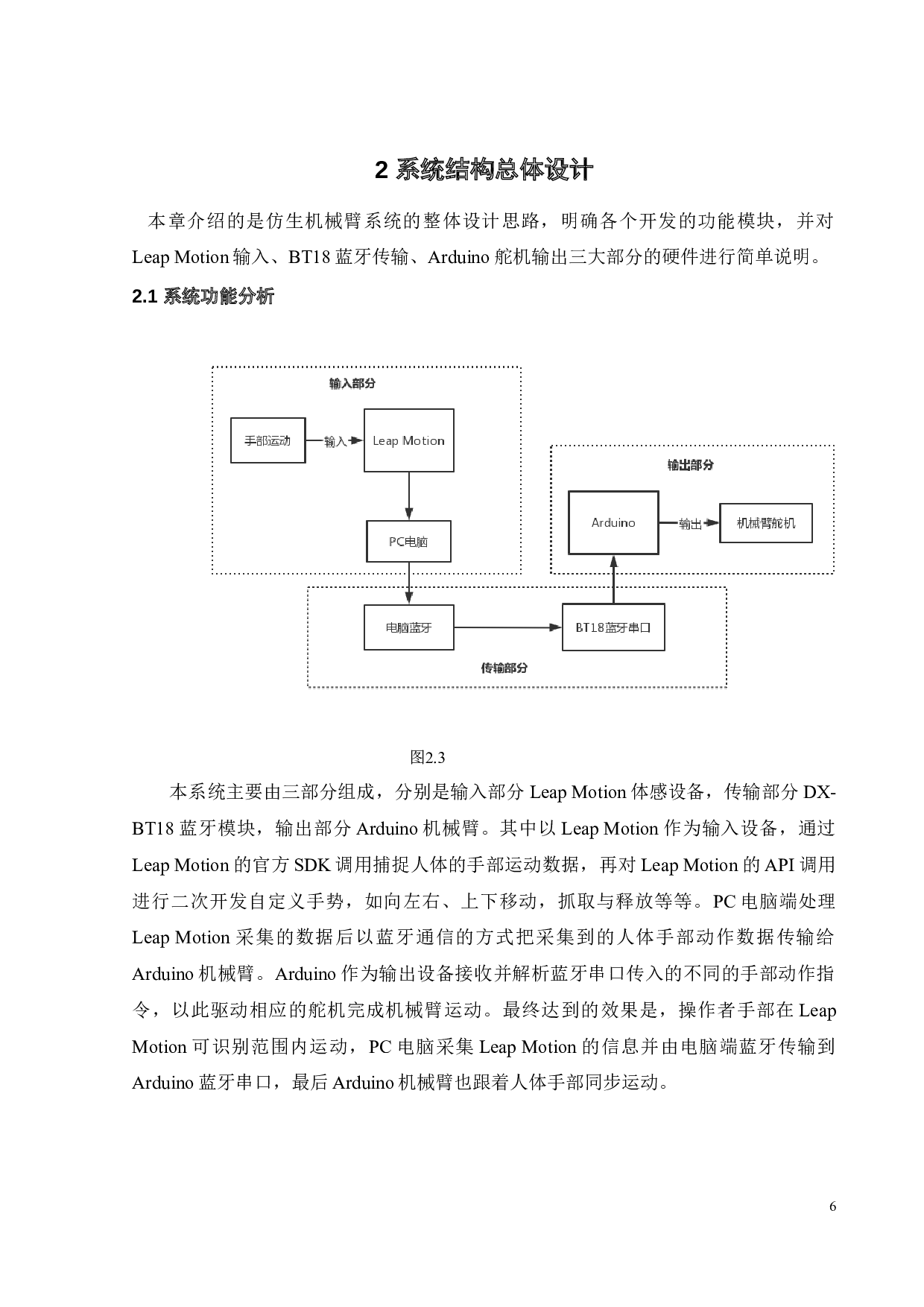
2.1 系统功能分析
6
2.2 系统总体结构设计
7
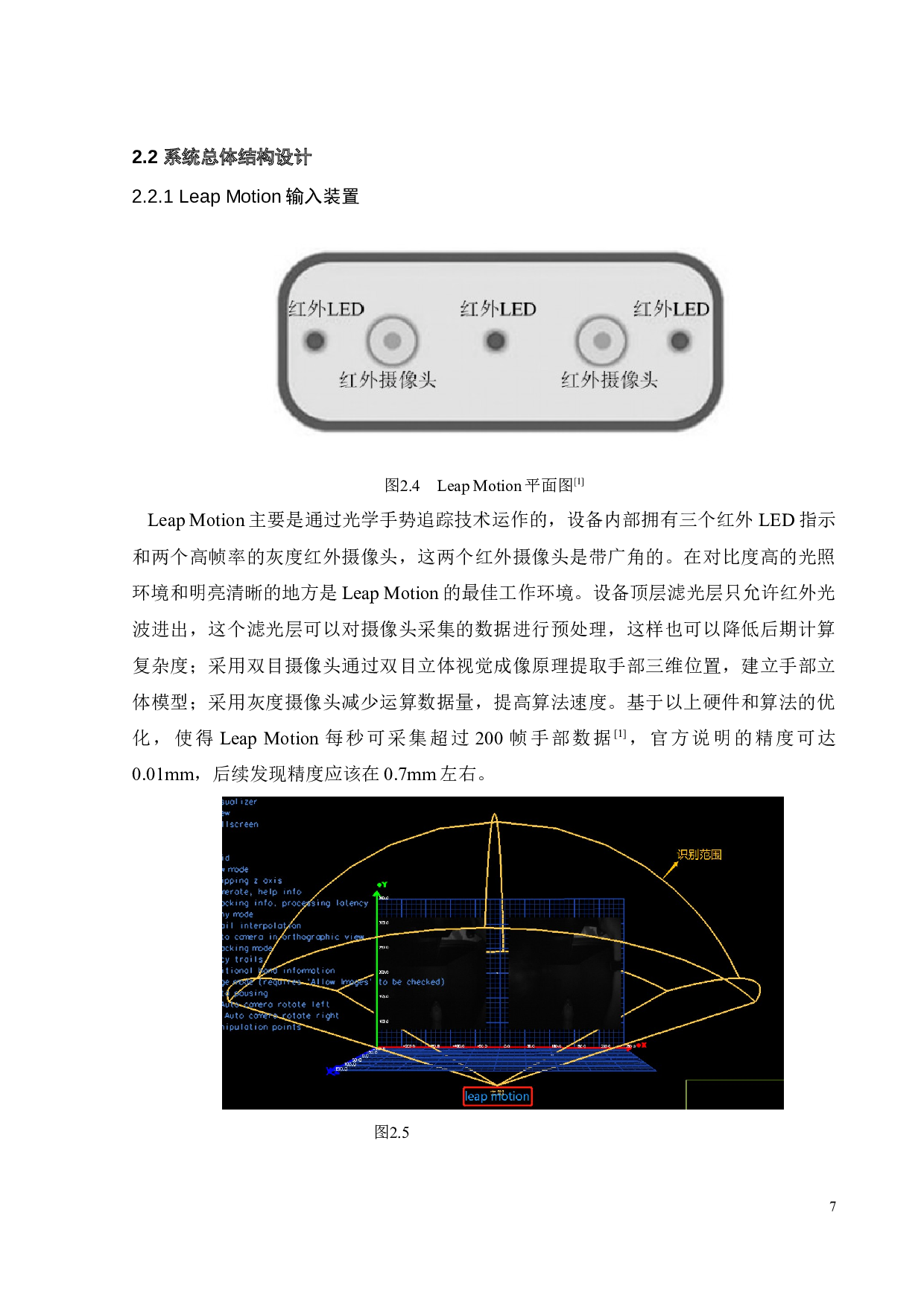
2.2.1 Leap Motion输入装置
7
2.2.2 BT18蓝牙传输装置
10
2.2.3 Arduino机械臂输出装置
12
3 仿生机械臂控制系统设计
14
3.1 Leap Motion数据采集实现方法
14
3.1.1 Leap Motion的采集
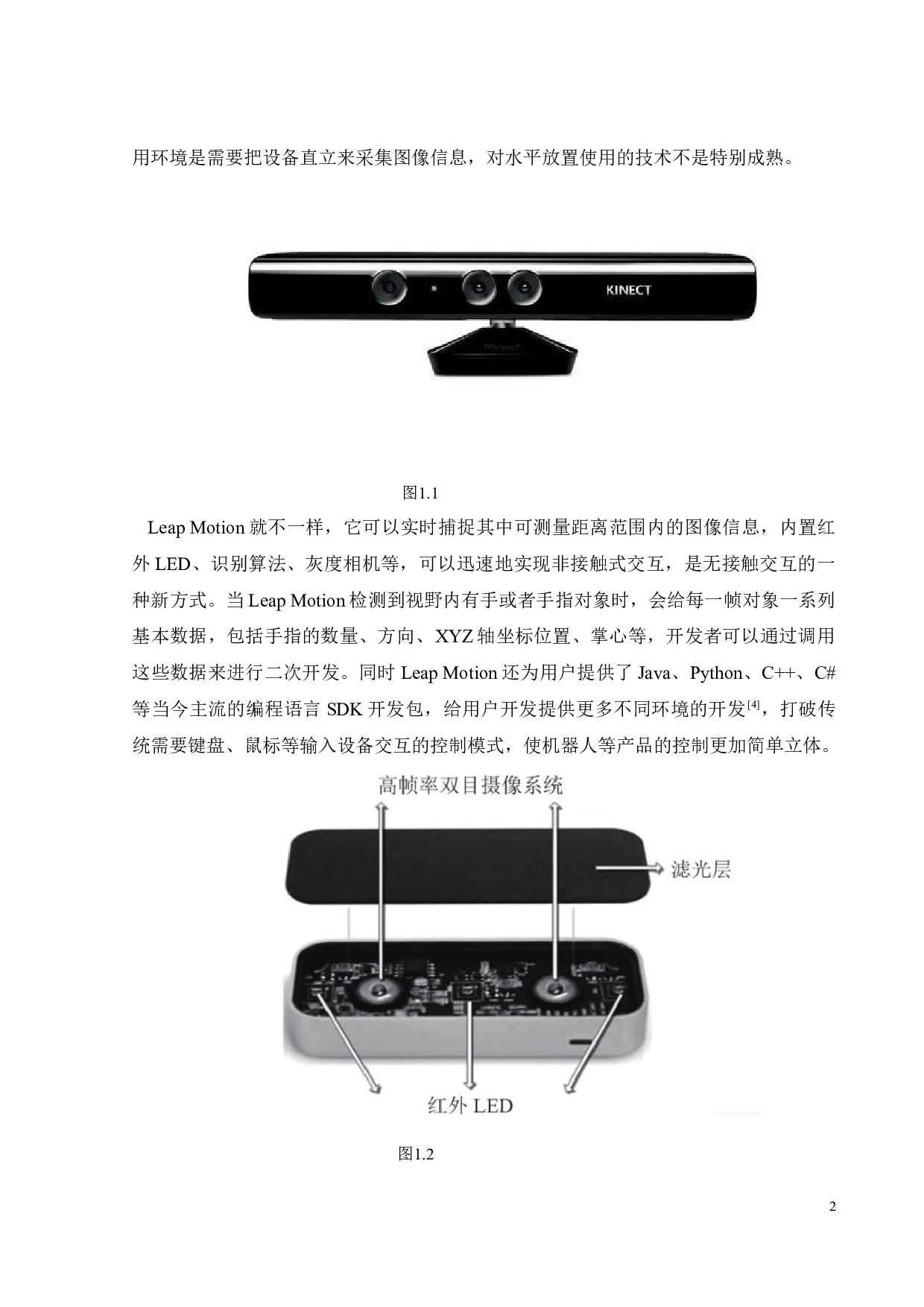
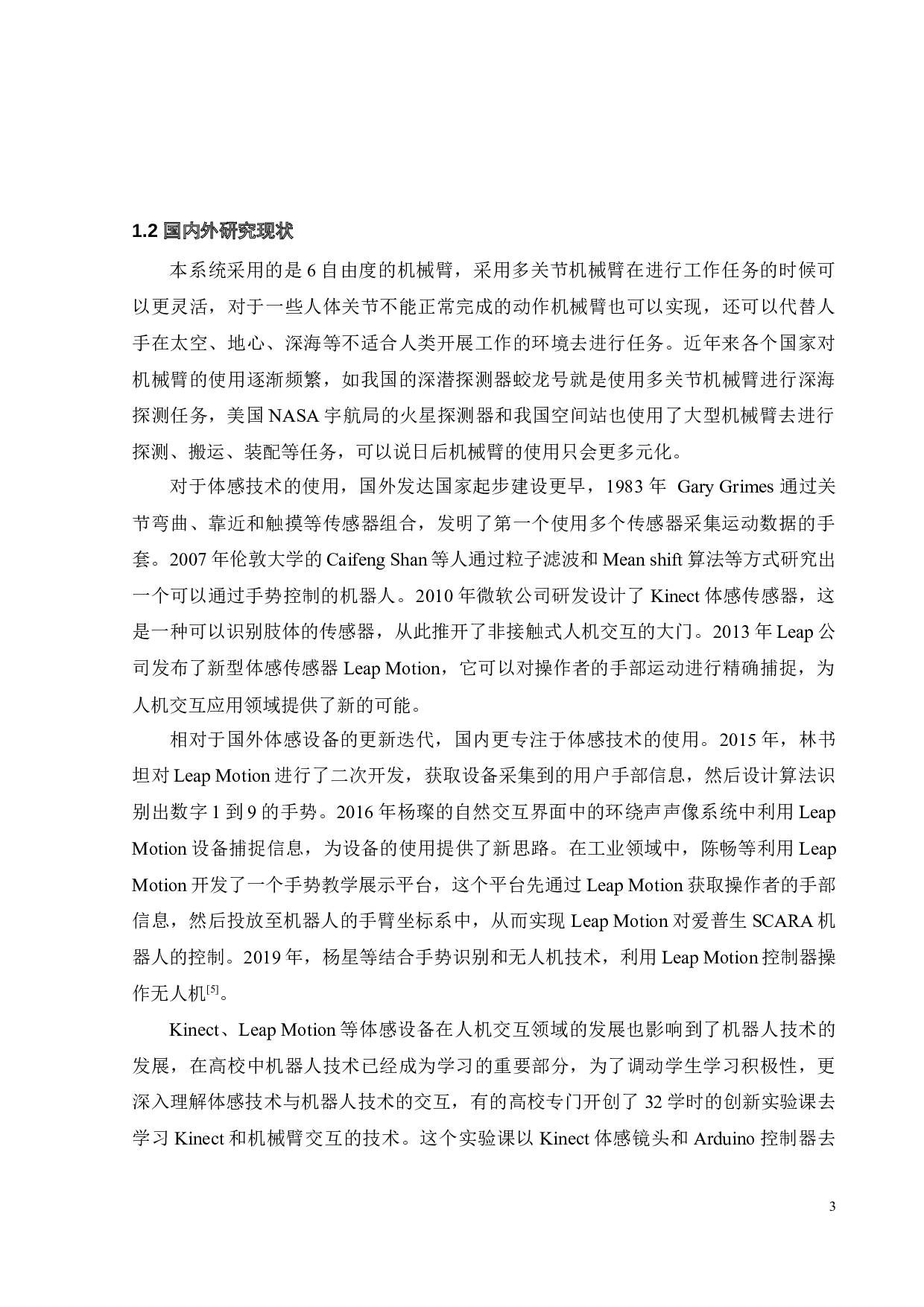
基于LeapMotion的仿生机械臂系统设计-23616字.docx