
北京理工大学珠海学院本科生毕业设计(论文)
基于单片机的动作感应机器人
—结构设计
摘要
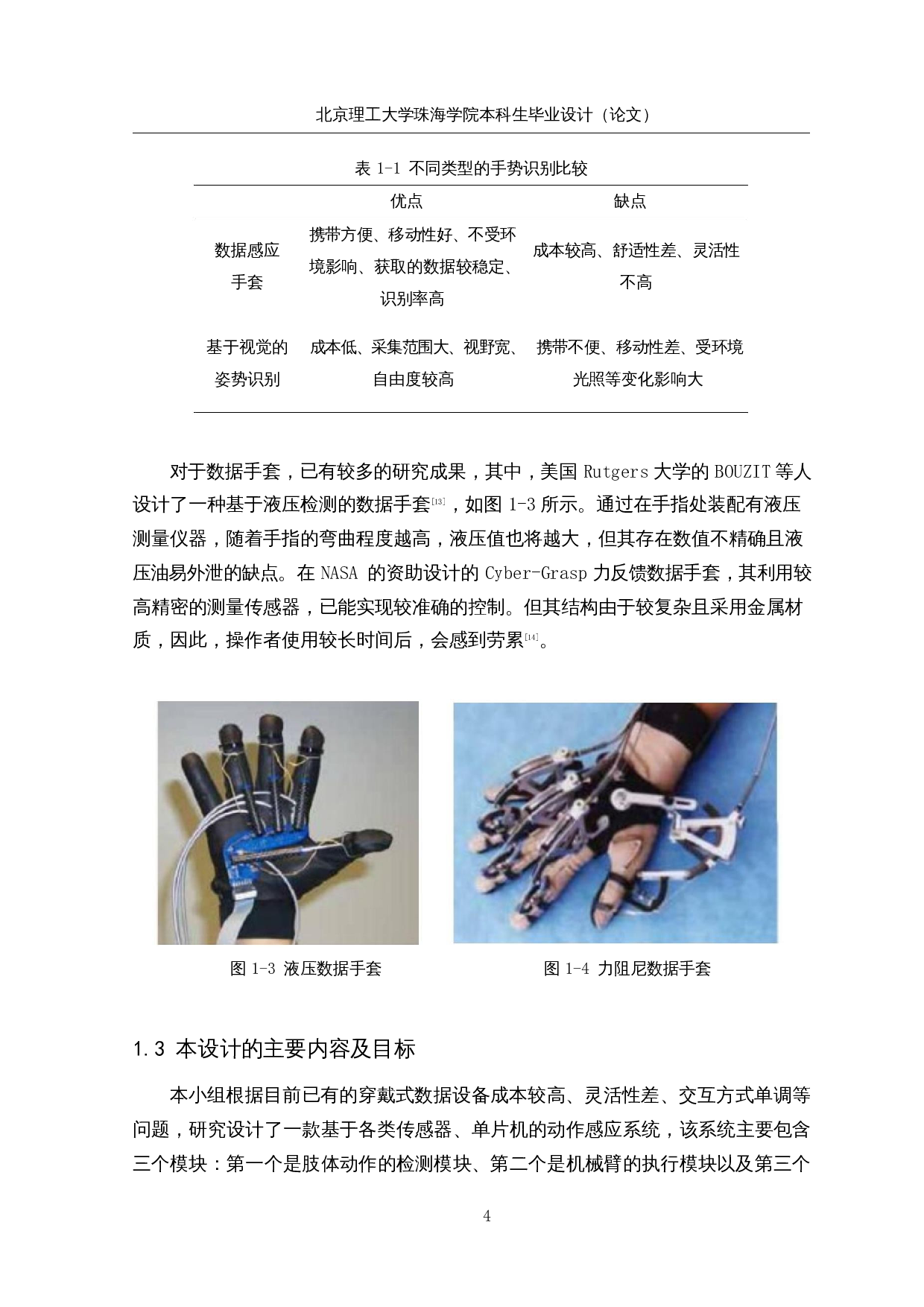
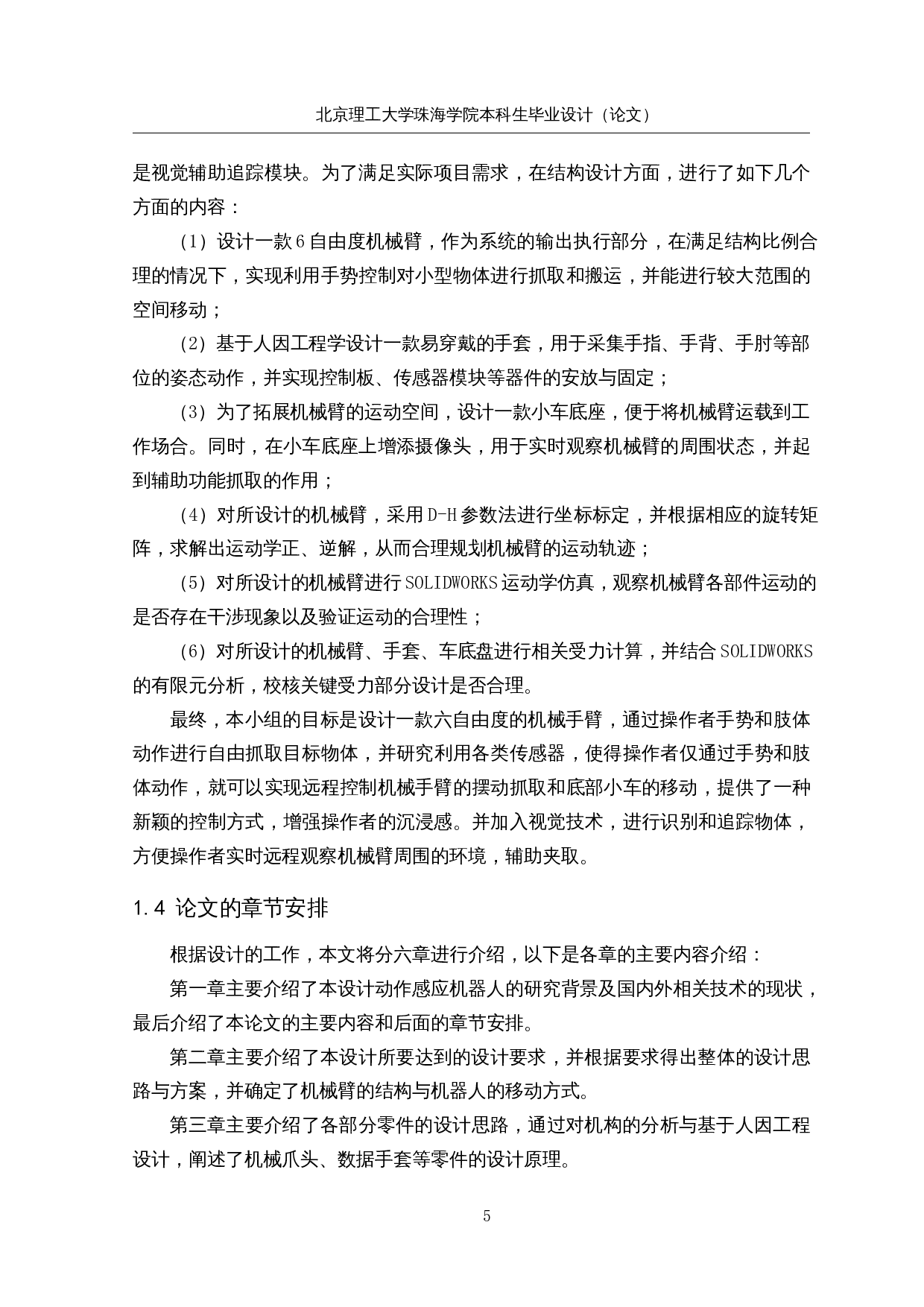
本文针对市面上已有的动作感应机器人交互功能较少,控制不精确,机器人运
动不灵敏且范围受到限制,操作者体验感差等问题,开展了结构上的设计研究。动
作感应机器人分为控制端结构与执行端结构。本设计控制端基于人因工程,仿照人
手关节,设计了一款易穿戴的多关节数据手套以及肘部活动件,给操作者带来较好
的沉浸感。执行端设计为
6
自由度的串联式机械臂,搭载于底部的移动小车,能够
进行较大范围的工作。并通过
D-H
参数法,求解
基于单片机的动作感应机器人-17219字.docx