

摘要
焊接的环境较为恶劣,而且对于焊接操作的技术要求很高。利用机器人进行焊接,
不仅节约了劳动成本而且具有精准、快速的特点,可以获得良好的接头强度。在本毕业
设计当中,主要内容是设计一个实验室用的焊接机械臂并对其进行运动仿真。完成这些
过程的前提不少,因焊接机械臂是交叉学科的产物,需要材料、机械、控制、算法等学
科知识,需要各个学科知识融会贯通。
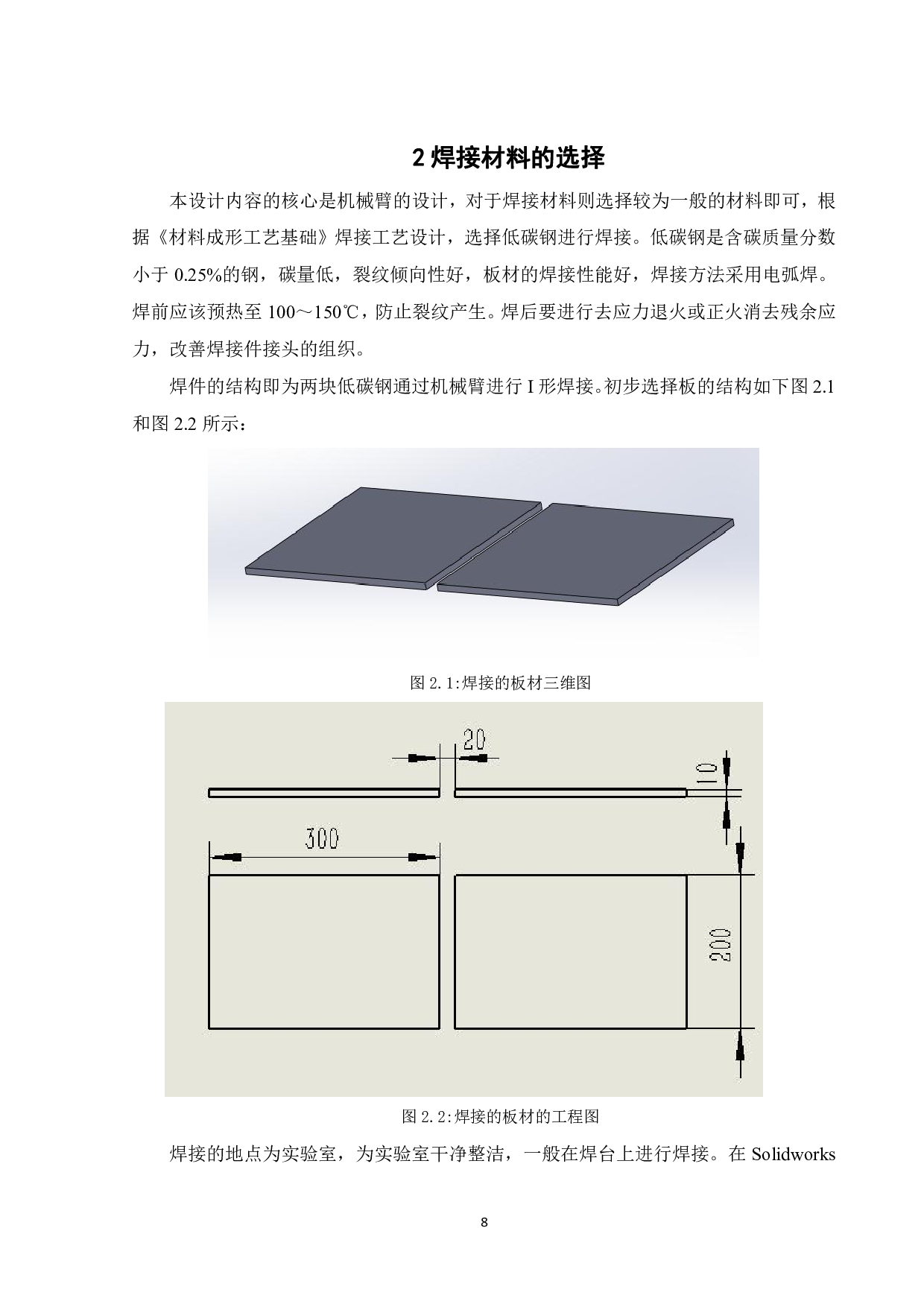
本设计首先对设置一个焊接条件和工况,对工作环境进行分析、选择对应的焊丝、
使用Solidworks优化一个三自由度的机械臂,最终优化出一个四自由度的机械臂。并对
该机械
一种实验室用焊接机械臂设计与仿真-16739字.pdf