
摘
要
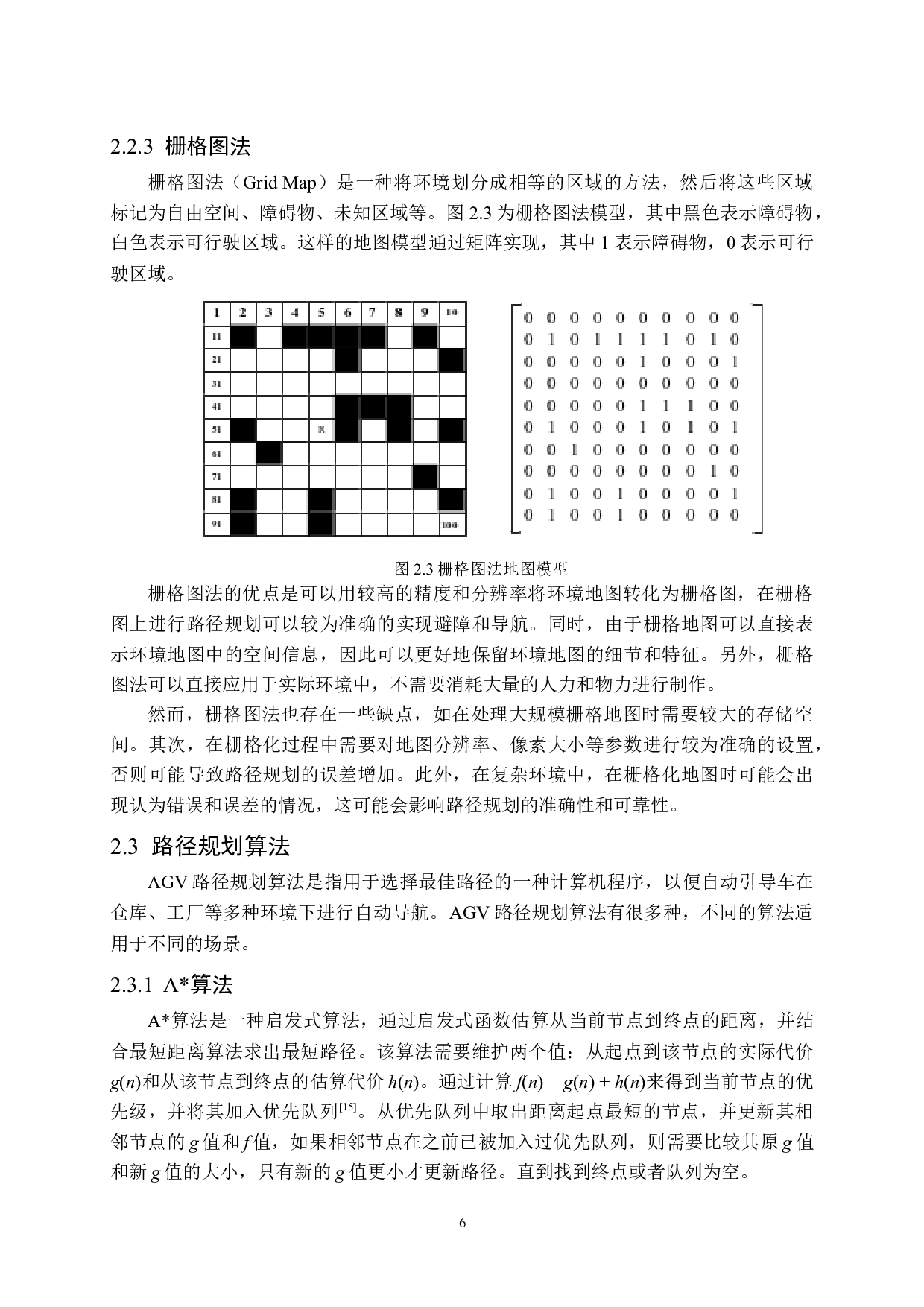
本文针对AGV集群在复杂环境中的路径规划问题,提出了基于遗传算法和仿真的解决方案。研究目的在于提高AGV集群的路径规划效率和优化路线,
避免AGV拥堵,
减少能源消耗和时间浪
费。首先,建立了AG
V集群
运行环境地图,模拟AGV集群在自动化仓库中的运动环境。
其次,
建立AGV集群路径规划遗传算法,
运用遗传算法对AGV集群的路径进行
规划
,在整个路径搜索空间内不断地寻找最佳路径候选者,并利用交叉和变异操作产生新的种群并
多次
迭代
,
达到更新全局最优解的目的。最后,在仿真平台上进行实验验证,结果表明该方法能够有
基于仿真的AGV集群调度路径规划系统设计-16530字.docx