


摘
要
在科学技术高速发展的今天,技术发展也从自动化到智能化的方向性转变,而智能
小车机器人
作为航空航天,智能检测,无人驾驶技术等各个领域的轮式移动机器人发挥着不可替换的作用。因此
AGV智能物流机器人
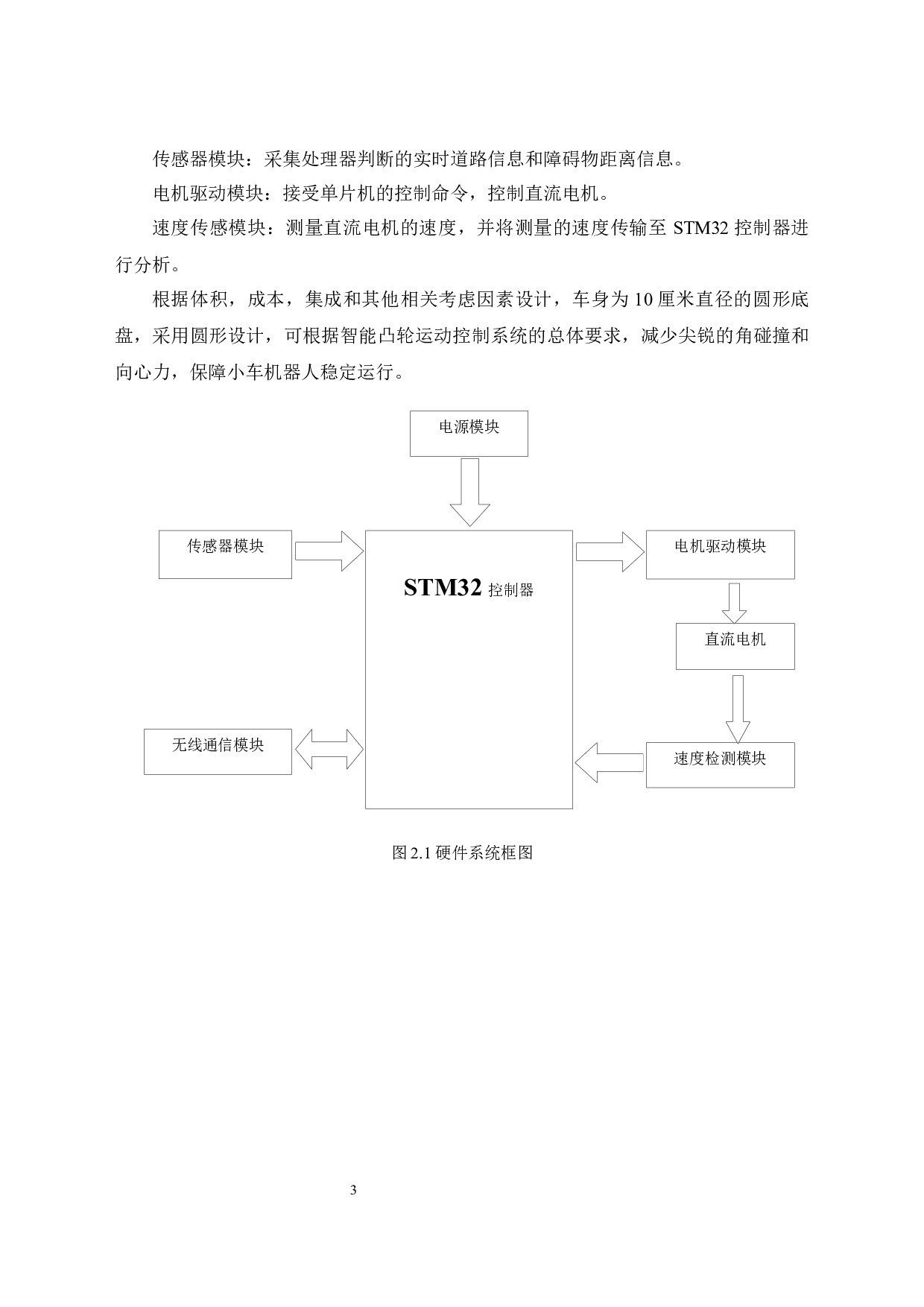
运动控制系统的研究与实现具有重要的理论价值和实际意义。本文采用32位嵌入式微控制器STM32F103RBT6作为
AGV智能物流机器人
的核心处理器,该处理器具有高速数据处理功能,并集成了大量外设资源。检测部分采用红外线光电传感器检测和识别环境,驱动系统则采用直流电机的两轮差动驱动方式,转向方便且灵活,行驶稳定。光电编
AGV智能物流机器人控制系统设计-11870字.docx