



摘 要
随着世界上第一个机器人的发明,掀起了一系列的机器人浪潮。一开始最初的机器人只能是固定在一个位置上的简单的机械臂,工作也只能做一些简单的夹取和移动。但是随着人们对机器人行业的研究和不断的发展,越来越多的新型机器人横空出世。面对机器人对于传统的遥控方法已经不能够达到对于目前高速发展的社会的要求,所以对于机器人的路径自动规划程序成为了研究的主要目标。本文就是基于粒子群算法对机器人的移动轨迹进行规划。
由于正常情况下,机器人从起始点到目标点的路径是为一条从起始点到目标点的直线,但是现实生活中经
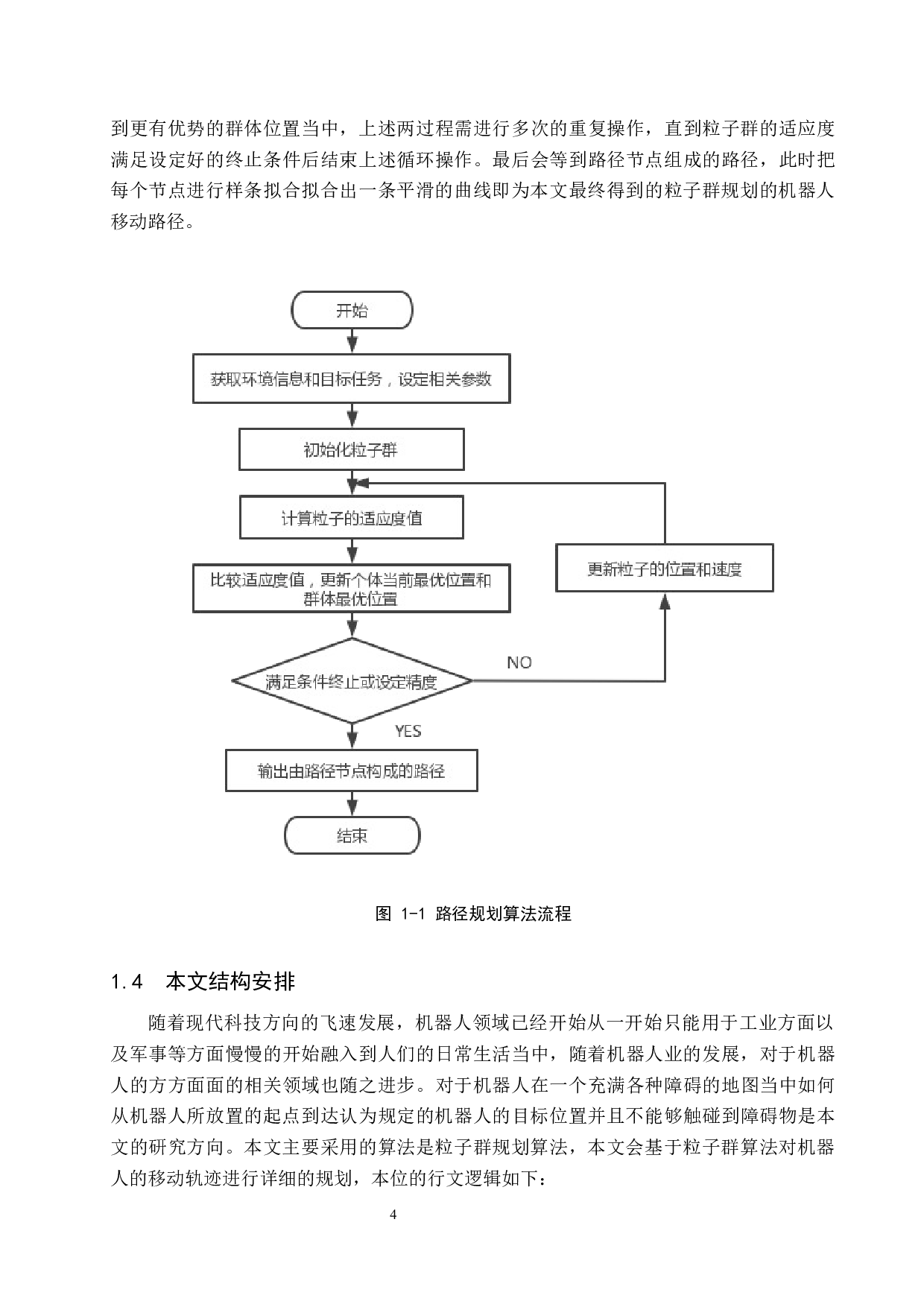
改进粒子群算法在移动机器人路径规划的应用-19365字.docx