
目录
1
引言
1
1.1
机械手
的研究意义
1
1.2
机械手
的发展历史
1
1.
3机械手
的
国内外现状
1
2设计方案比较
2
3 系统的硬件设计
3
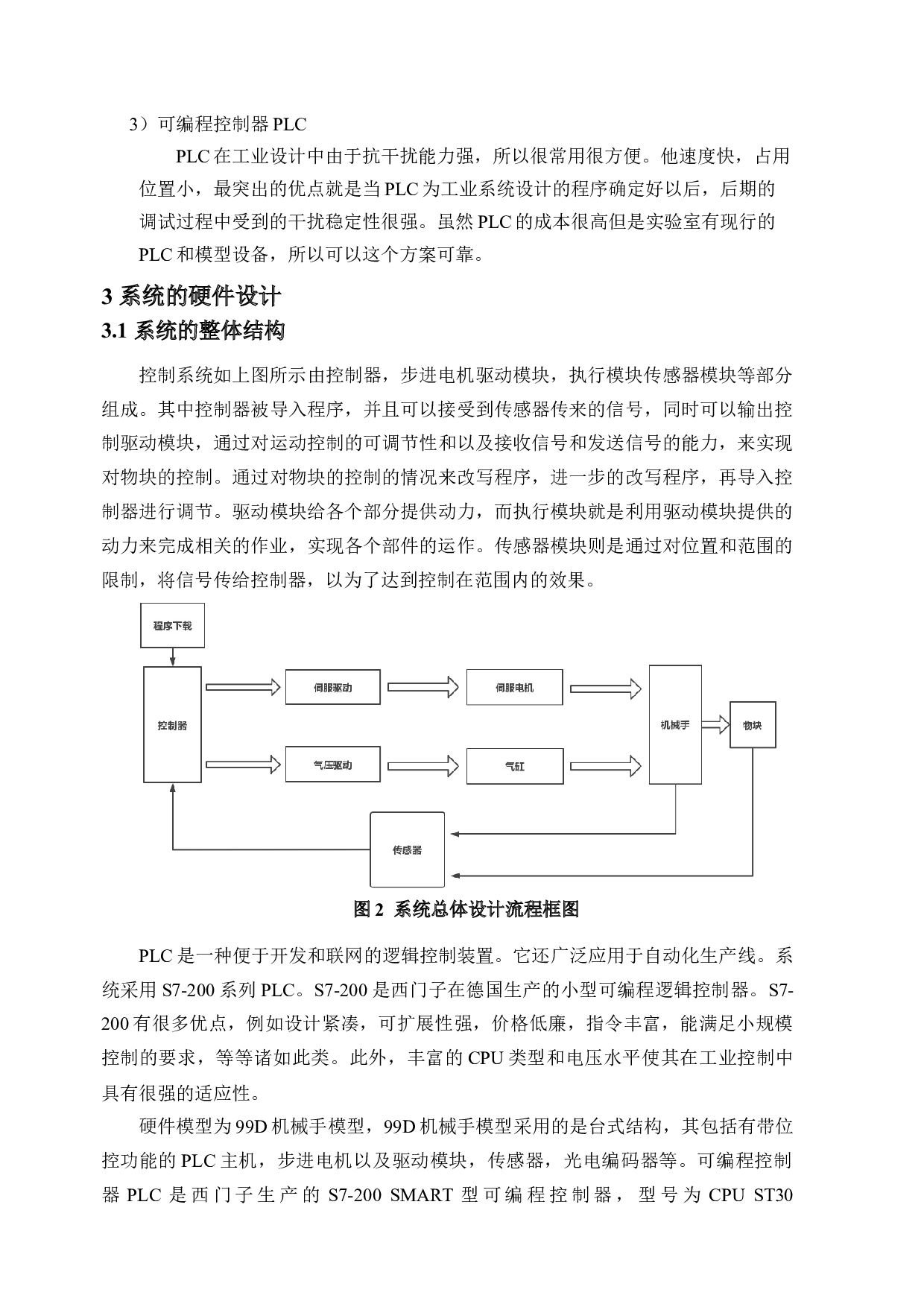
3.1 系统的整体结构
3
3.2 系统的电路接线图
5
3.2.1
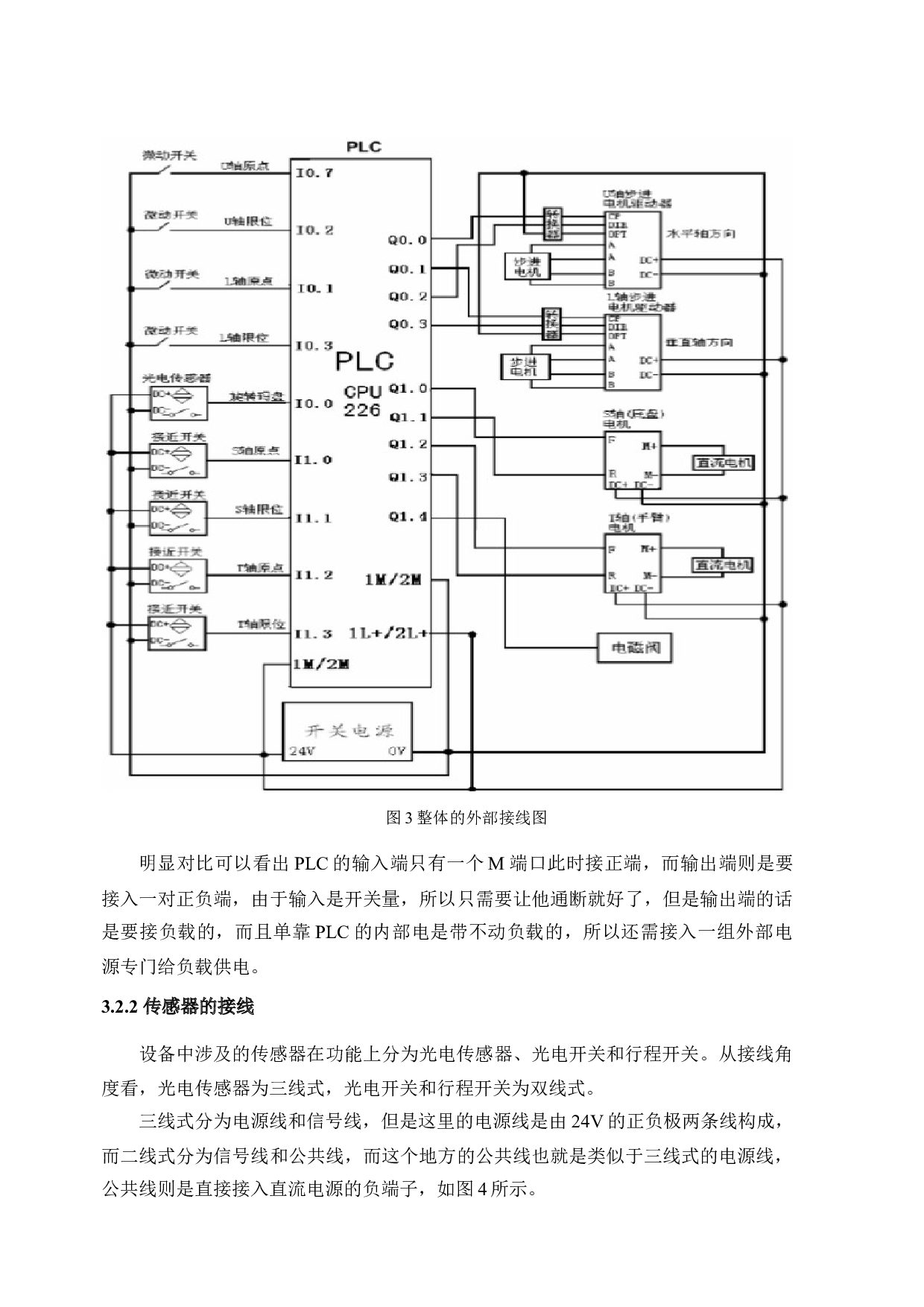
PLC的接线图
5
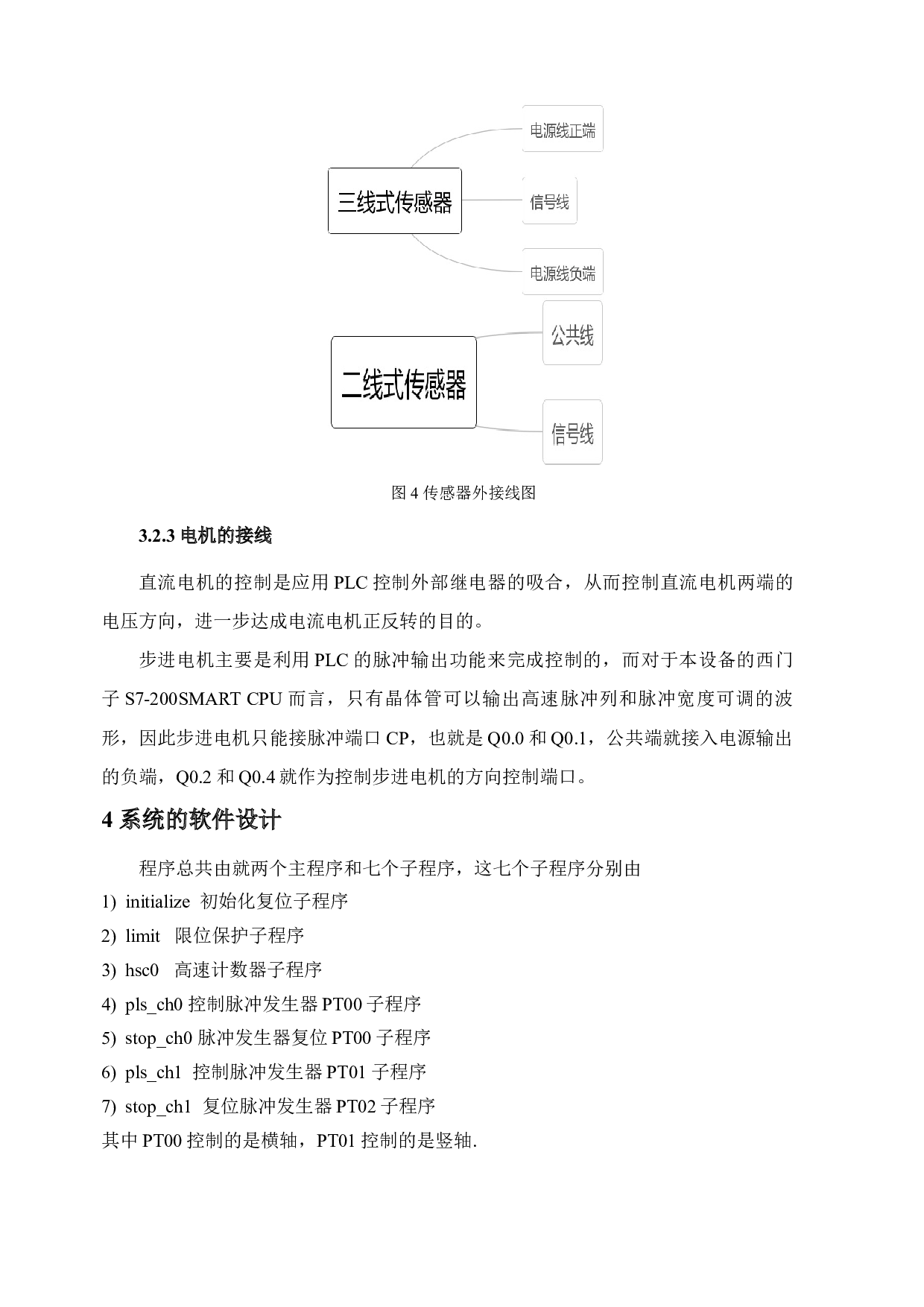
3.2.2 传感器的接线
6
3.2.3
电机的接线
7
4 系统的软件设计
7
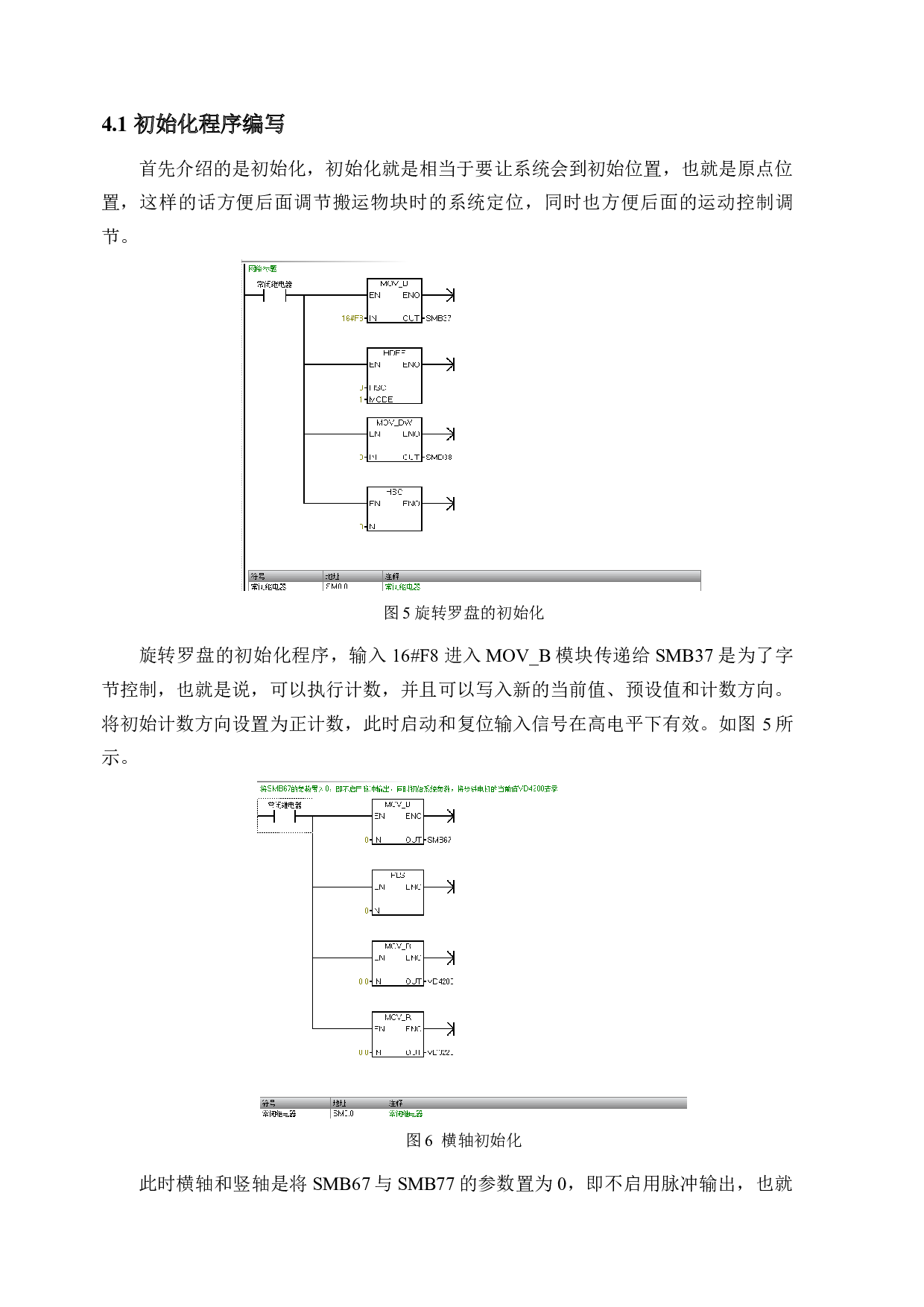
4.1 初始化程序编写
8
4.2 传感器限位程序编写
10
4.3 旋转数码盘程序编写
11
4.4 移动搬运程序编写
13
5 调试
16
6 结论与展望
17
6.1 结论
17
6.2 展望
17
参考文献
18
致谢
19
附录
20
简易搬运机器人控制系统设计
作者:
段传恺
指导教师:
钟久明
副
教授
简易搬运机器人控制系统设计-7606字.docx