

继电器弹片搬运机械手臂的结构设计及仿真
摘 要
工业机械手是当前国内外众多工业设备中最为活跃的之一,并且工业机械手是高速成长工业设备。故而,研究工业机械手设计与工作原理对提升产品品质有重要价值。在机械装置设计与开发中,重点是产品的品质和生产花费。伴随产品生产加工业的全球化,我国正慢慢变成产品生产加工业超级强国。从机械手臂发展获取有效的经济效益,从根基上变更了传统机械装置设计与制造方式。
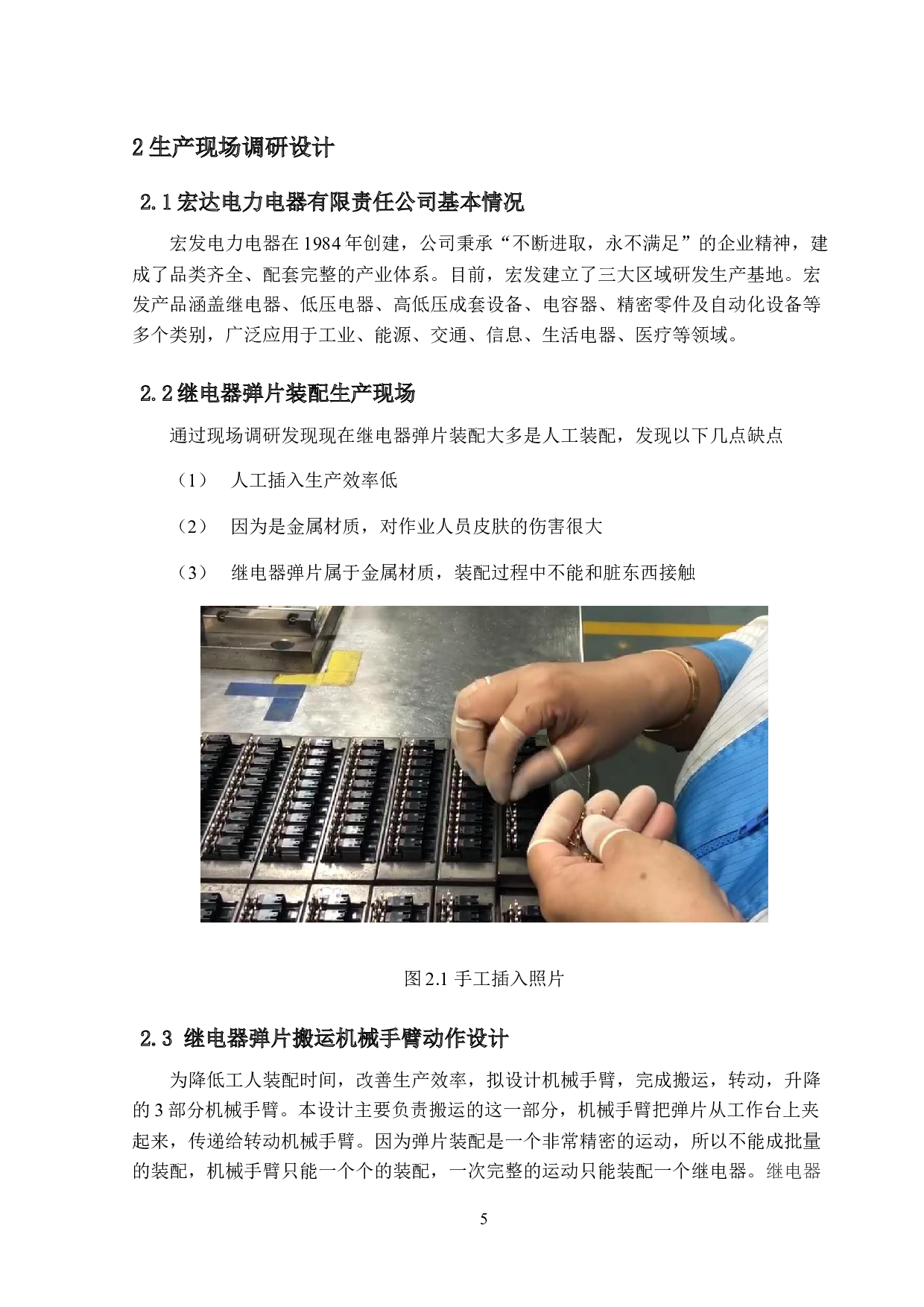
在继电器装配过程中,弹片极为常见。而对弹片装配到外壳,又是常见工序。本设计,利用机械手从生产线上抓取工件,将其放
继电器弹片搬运机械手臂的结构设计-14740字.docx