

目 录
一、
前言
3
1.1
本设计的目的、意义
3
1.2
本设计在国内外的发展概况及存在的问题
3
1.3
设计方案的选择
4
1.4
本设计应解决的主要问题
4
1.5
小组分工
5
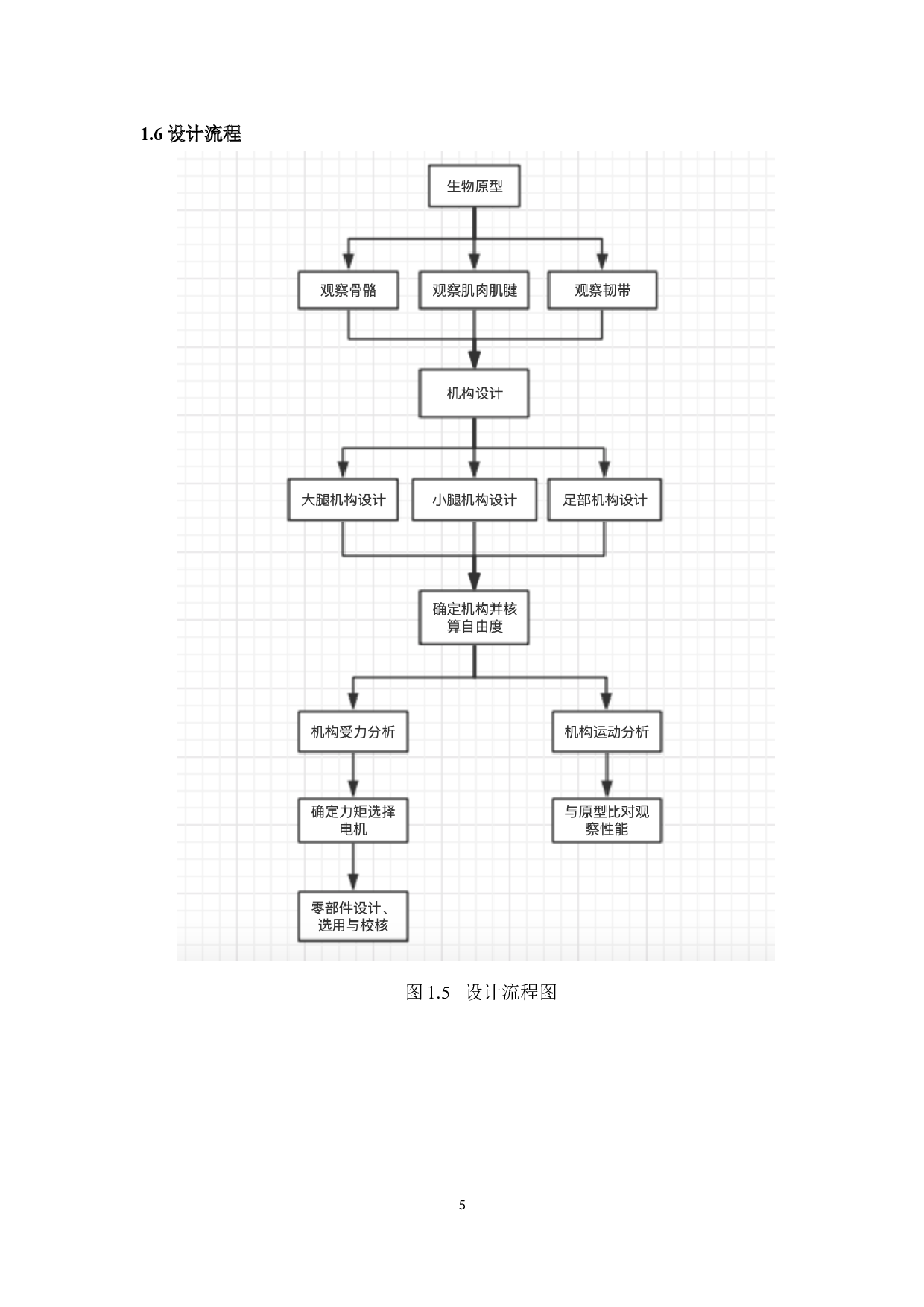
1.6
设计流程
6
二、机械腿设计
7
2.1
设计原理
7
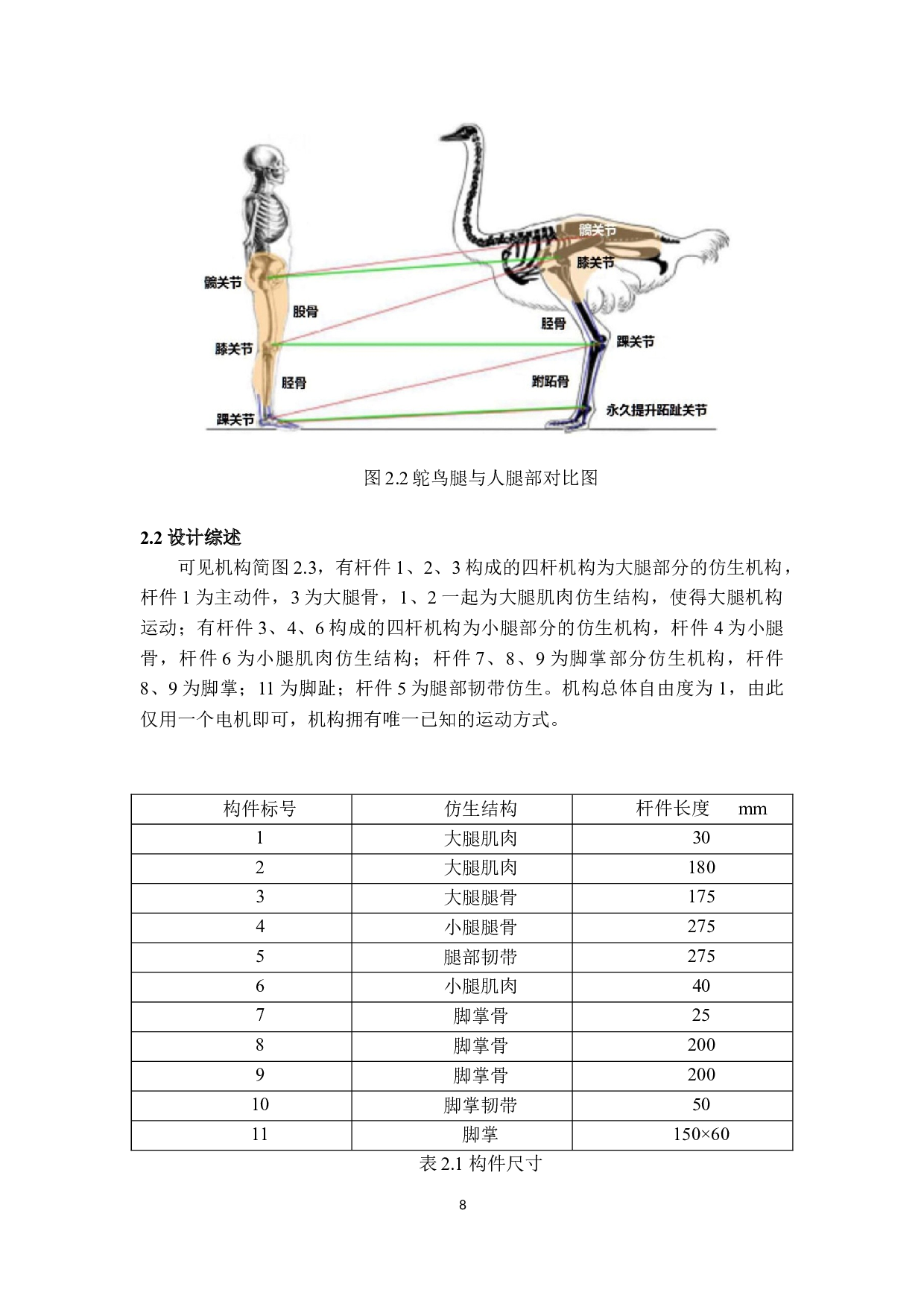
2.2
设计综述
9
2.3
结构设计
10
2.4
平面连杆机构的受力分析
15
2.5
杆件的设计
23
2.6
零件的选用与校核
24
2.7
机构运动分析
33
三、结论
44
参考文献
45
谢
辞
46
附
录
47
一、
前言
1.1
本设计的目的、意义
普通的探月车在沙地环境下的运动会收到各种地形因素的干扰,如石子、路面凹凸不平、滑沙等,导致运
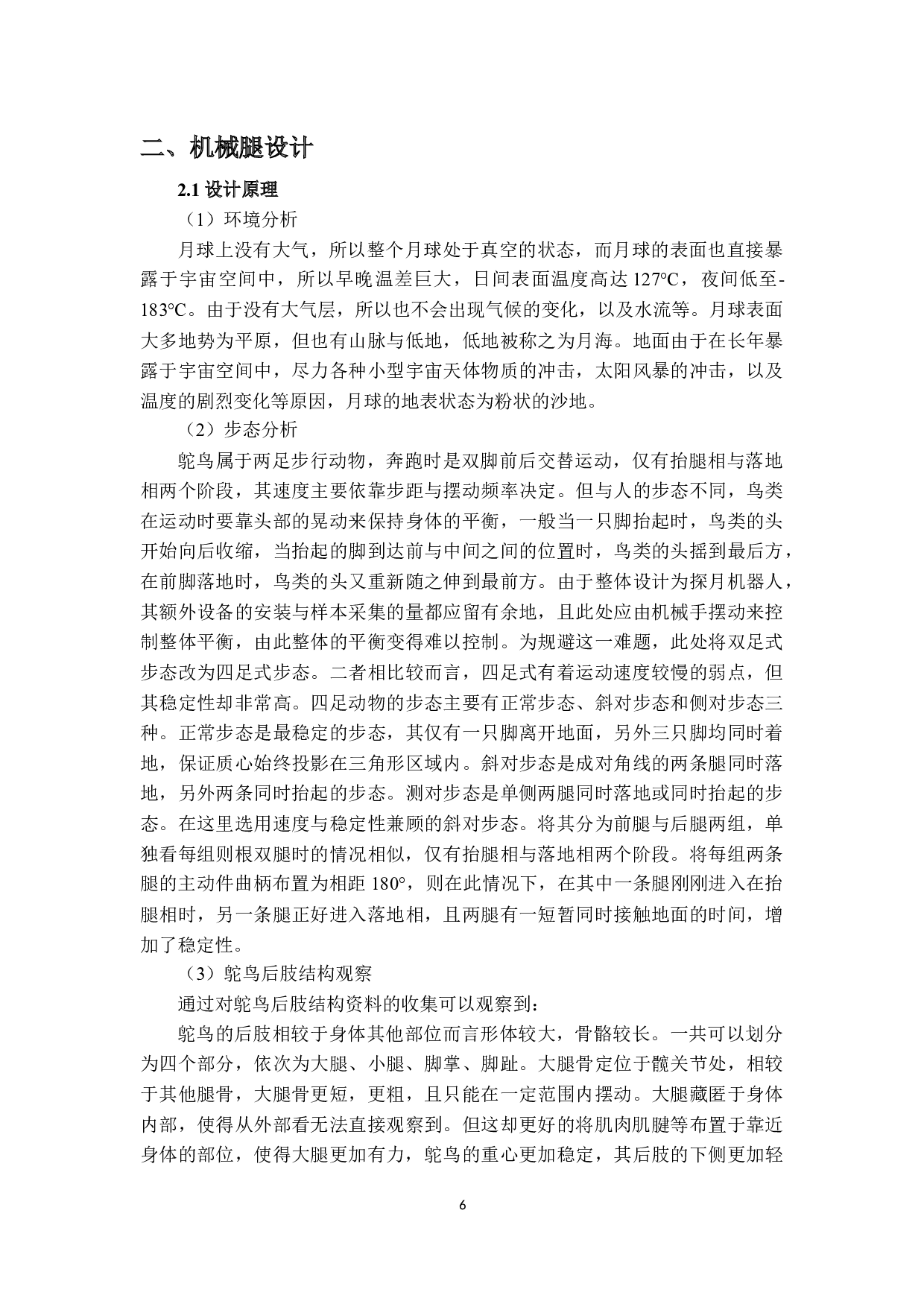
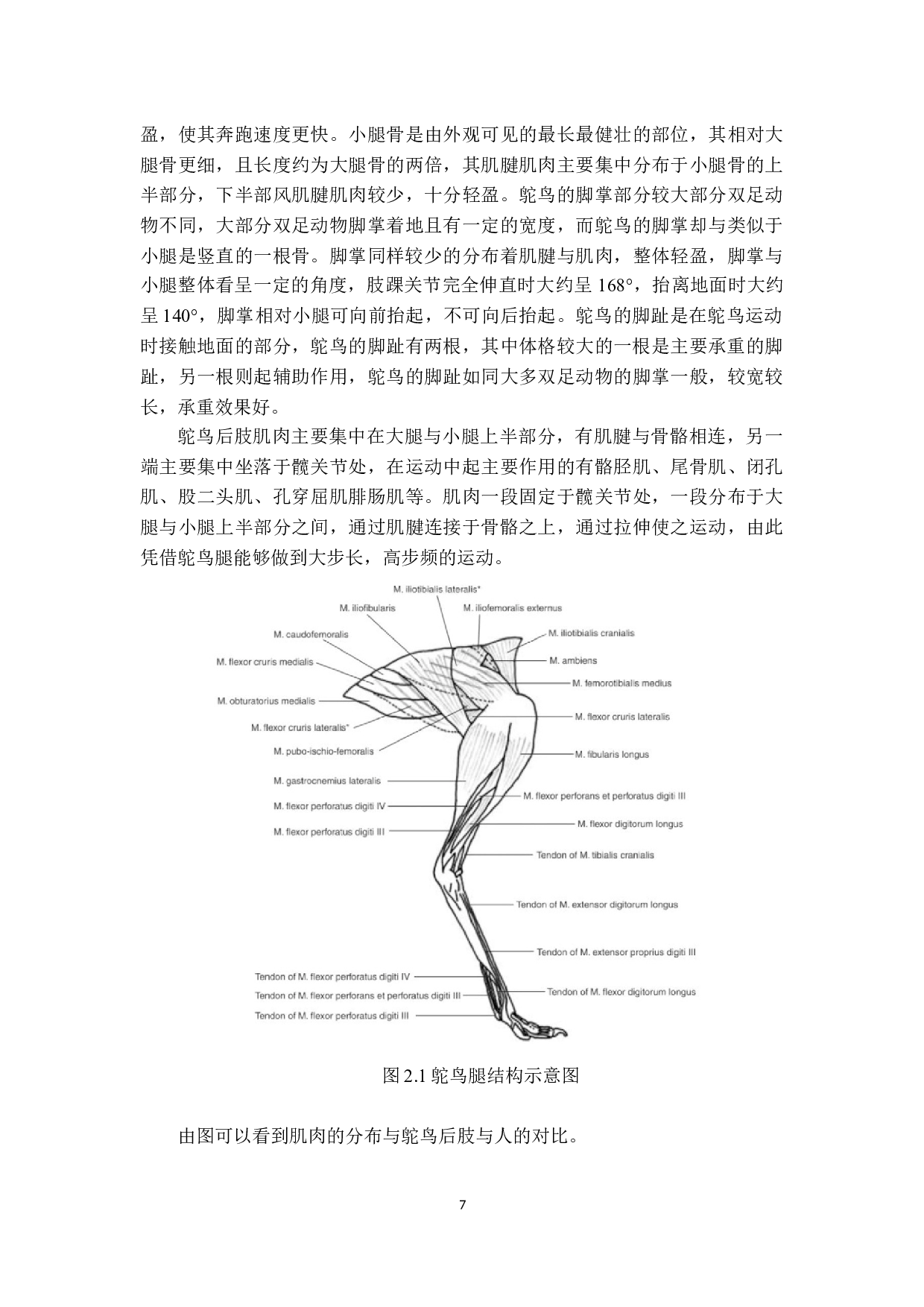
探月机器人机械腿仿生设计-16877字.docx