

本科毕业设计(论文)
RGB-D相机标定方法
对建图精度
影响
的实验研究
学 院
土木与交通工程学院
专 业
测绘工程
年级班别
2018级 (
1)
班
学 号
3118003468
学生姓名
陈勇
指导教师
付仁俊 丁琼
2022年
6
月
摘要
随着人工智能技术的火热,深度视觉已经掀起视觉革命的新浪潮,智能移动机器人在各个领域都得到了广泛的应用。
SLAM
(
Simultaneous Localization and Mapping
,同步定位与地图构建)
,是移动机器人实现自身定位和自主
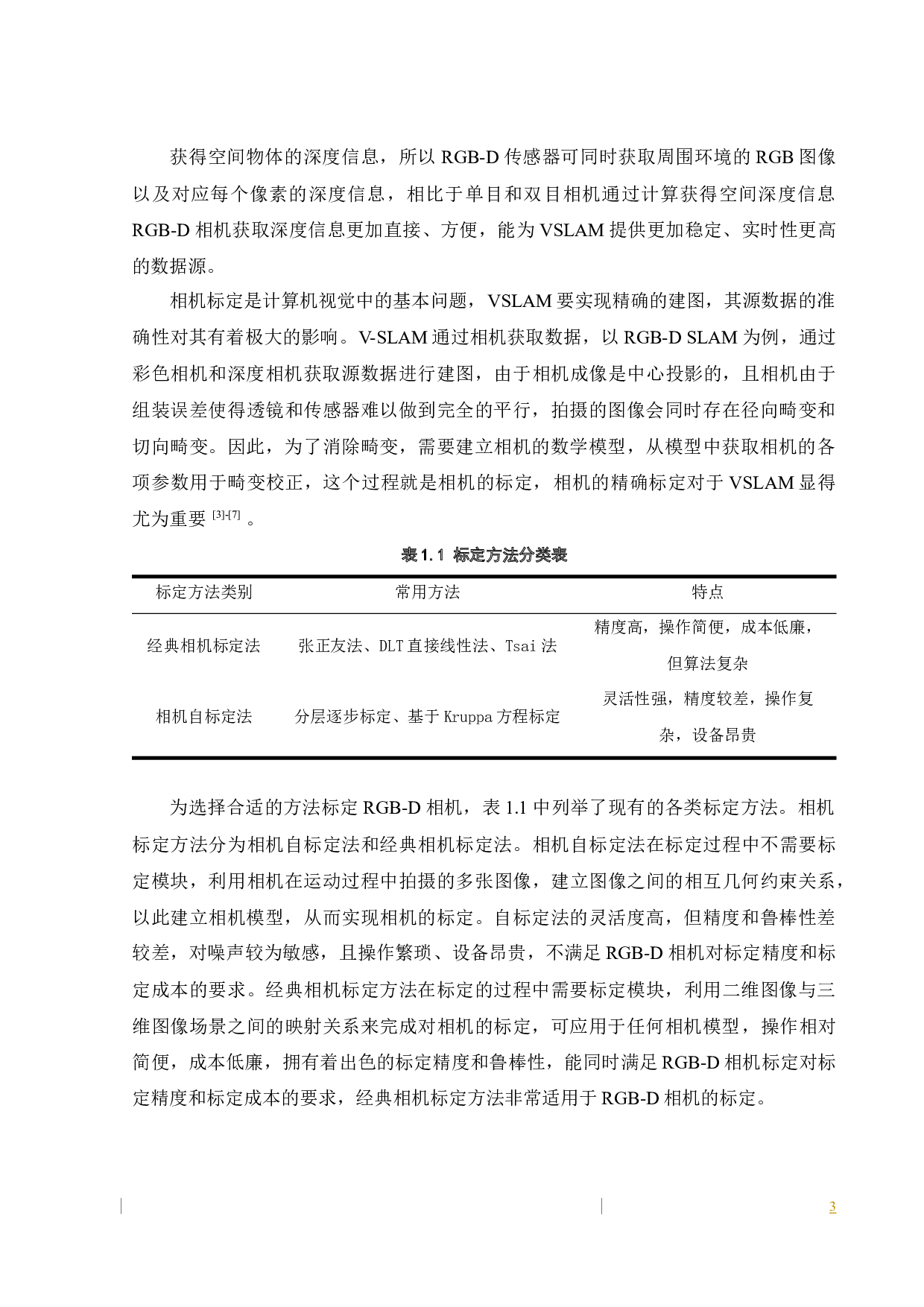
RGB-D相机标定方法对建图精度影响的实验研究-21892字.docx