
摘要
机器人是一个多领域多学科相互交叉融合的学科,机器人融合了机械,材料,力学,
控制,人工智能等相关知识。而在众多机器人当中,双足机器人与人类行为最为相近,
也是最能适应人类生活环境的机器人之一。在应用方面,可以用于救援,建筑,医护,
运输等多个方面。
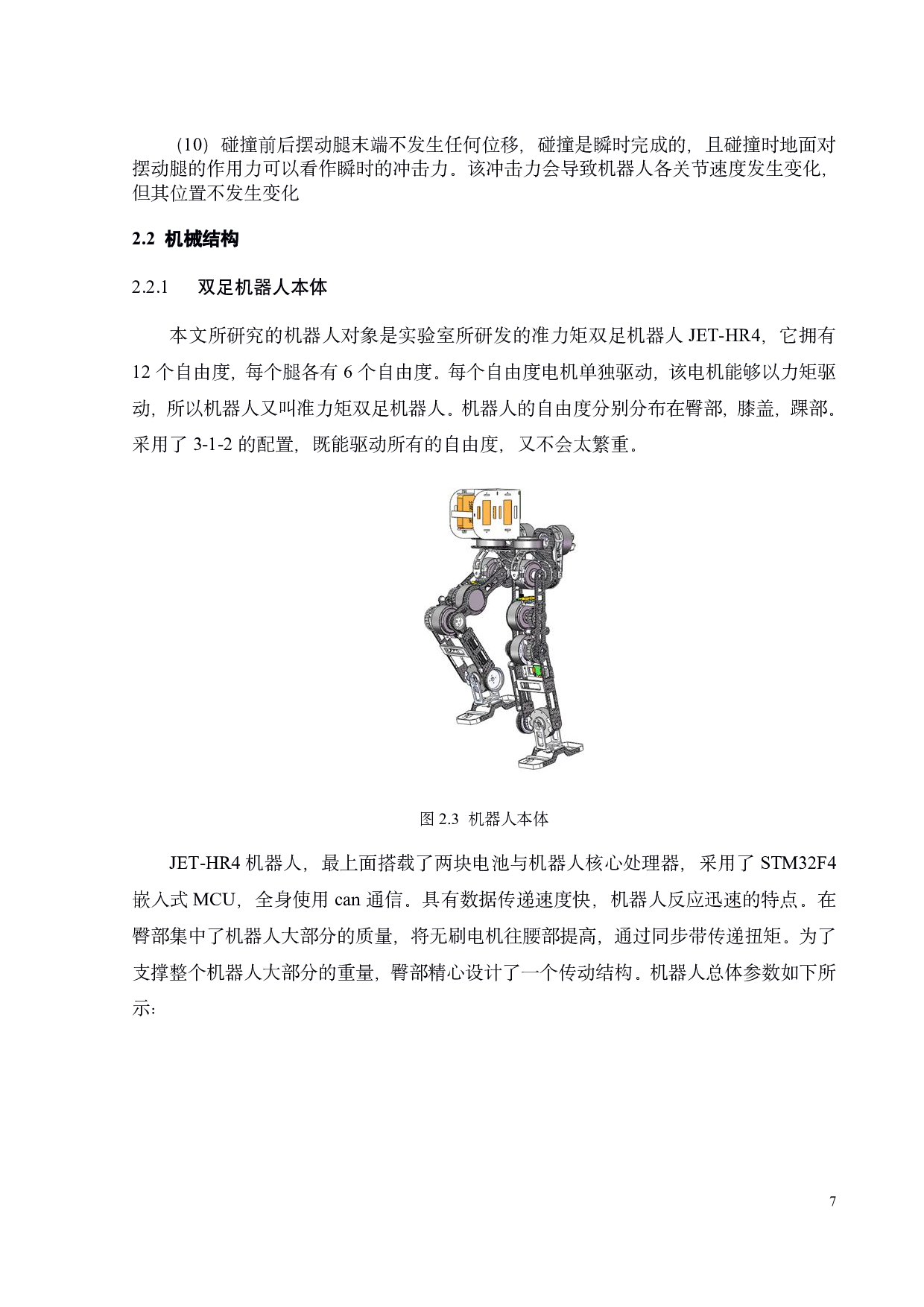
本文基于实验室的JET-HR4为研究对象,该机器人有12个自由度,12个准力矩电
机。在论文的第二章里,详细介绍了该机器人的机械结构。利用DH表建立正运动学表
达式,利用牛顿下山法获得运动学逆解。基于拉格朗日动力学获得机器人的状态空间表
达式。
在论文的第三章,介绍
基于准力矩的动态双足行走控制-16368字.pdf