

I
摘 要
自平衡两轮车研究最大的问题在于平衡系统的不稳定,操控的精准度与灵敏度难以保
障。
根据上述问题而进行了针对自动平衡两轮车的平衡和循迹功能的研究,硬件部分则包
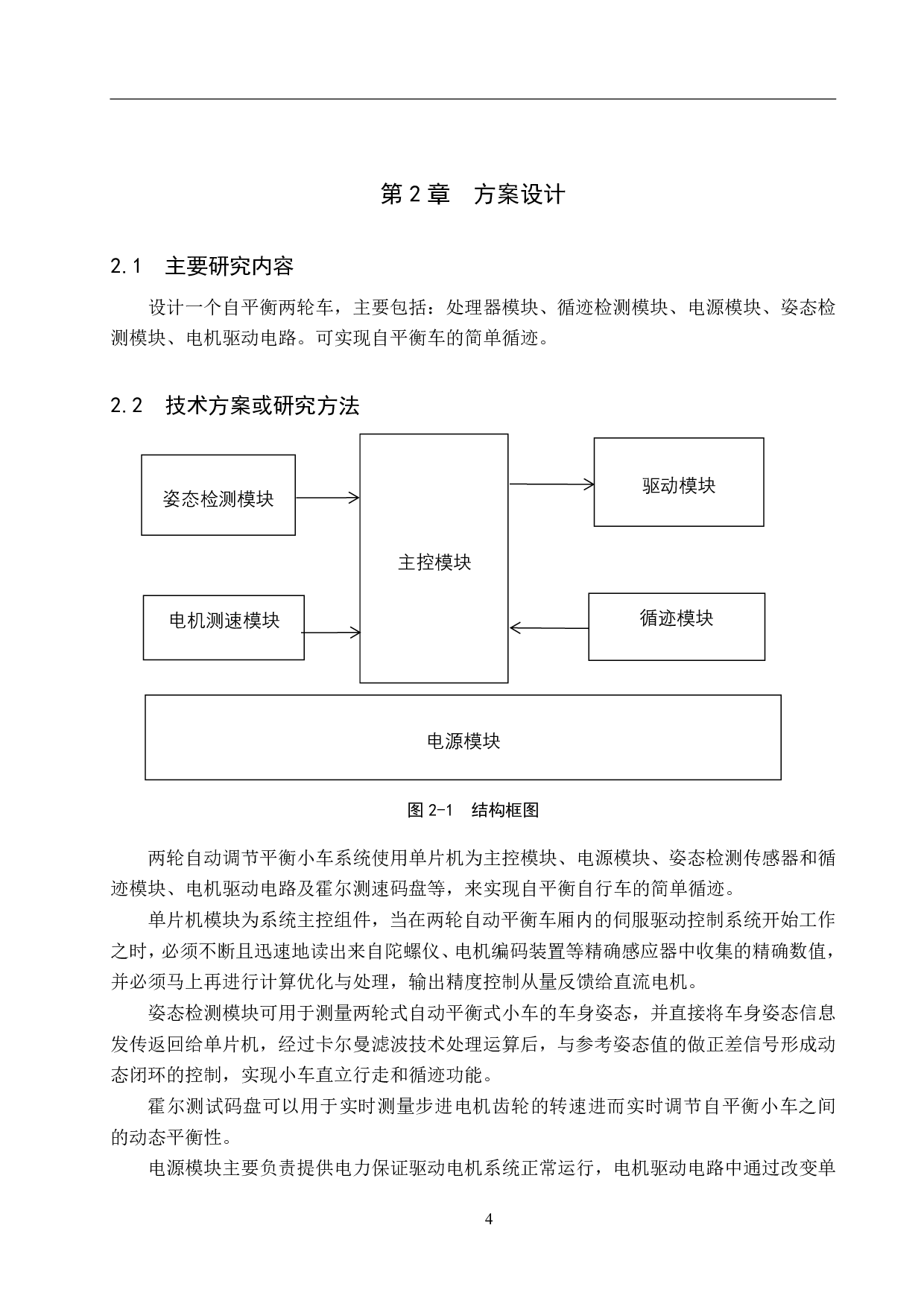
含以单片机模块,电源模块、姿态测量模块、平衡循迹模块、电力驱动模块和霍尔测量码
盘等,以单片机为主控单元,在运行过程中为了保持小车平衡,需要不断地从陀螺仪、电
机编码器等传感器中读出数据,然后进行运算,将控制量反馈给单片机。姿态检测模块主
要是对双轮自动平衡车进行姿态测量,通过卡尔曼滤波与基准数据的差分形成闭环控制,
达到站立和步行的目的
基于单片机的自平衡两轮车设计-16645字.pdf