
摘
要
随着工业技术的不断发展,经济水平的不断提高,自动化装备中的工业机器人已被越来越多的应用到了生产实际当中,在工业生产制造、医疗、生活娱乐服务、军事以及半导体制造和太空探索中都能看到。工业机器人的广大应用不仅解放了大量的劳动力,也进一步提高社会生产效率,使得人们的生活水平也获得极大的提高。而多关节机械
臂作为
机器人技术领域中使用最广泛的自动机械装置,它们都具有共同的特征,即它们可以接受指令并准确地定位三维(或二维)空间中的点来完成一些操作,以代替人类高效而准确完成某些重复性的动作,因此
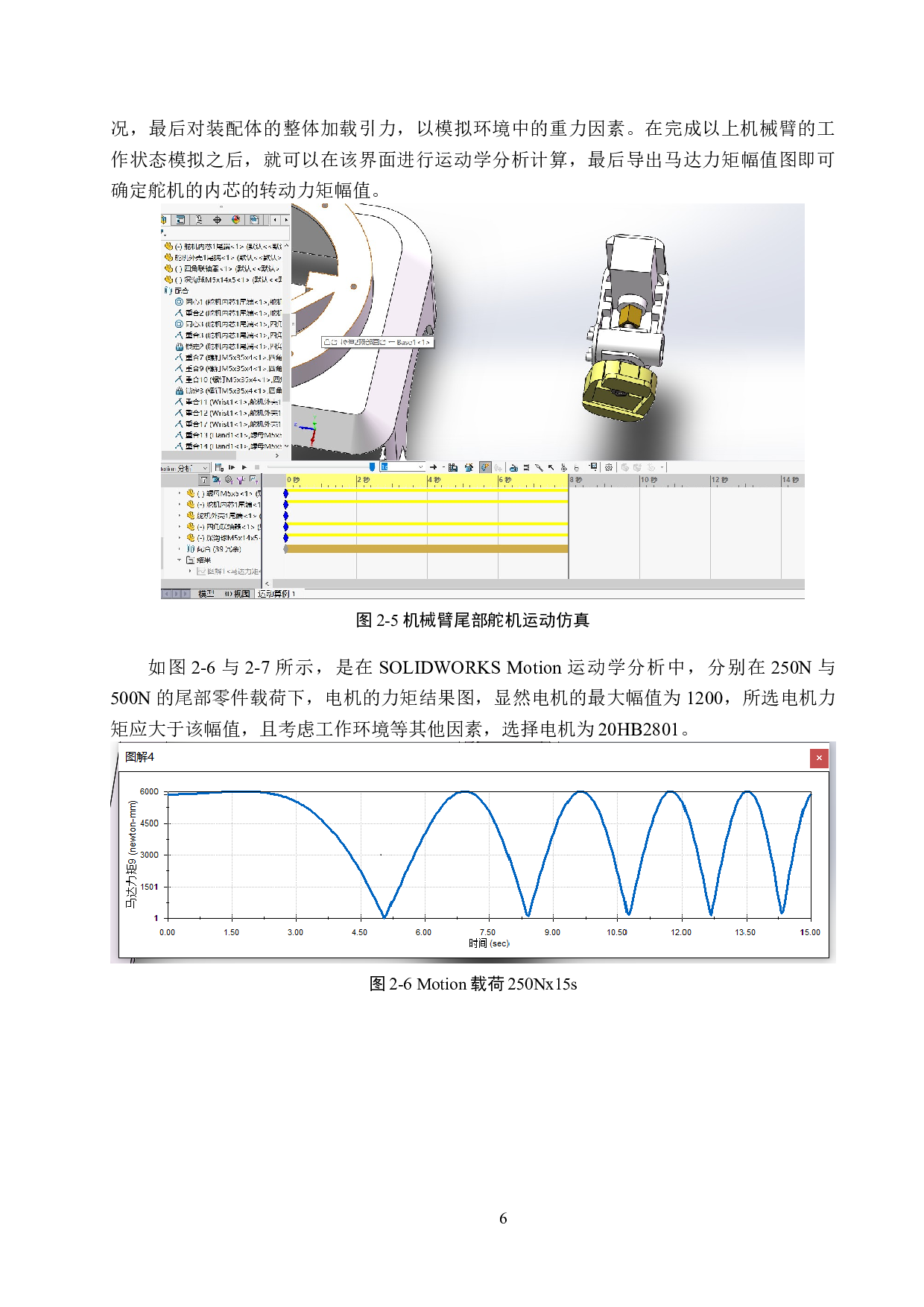
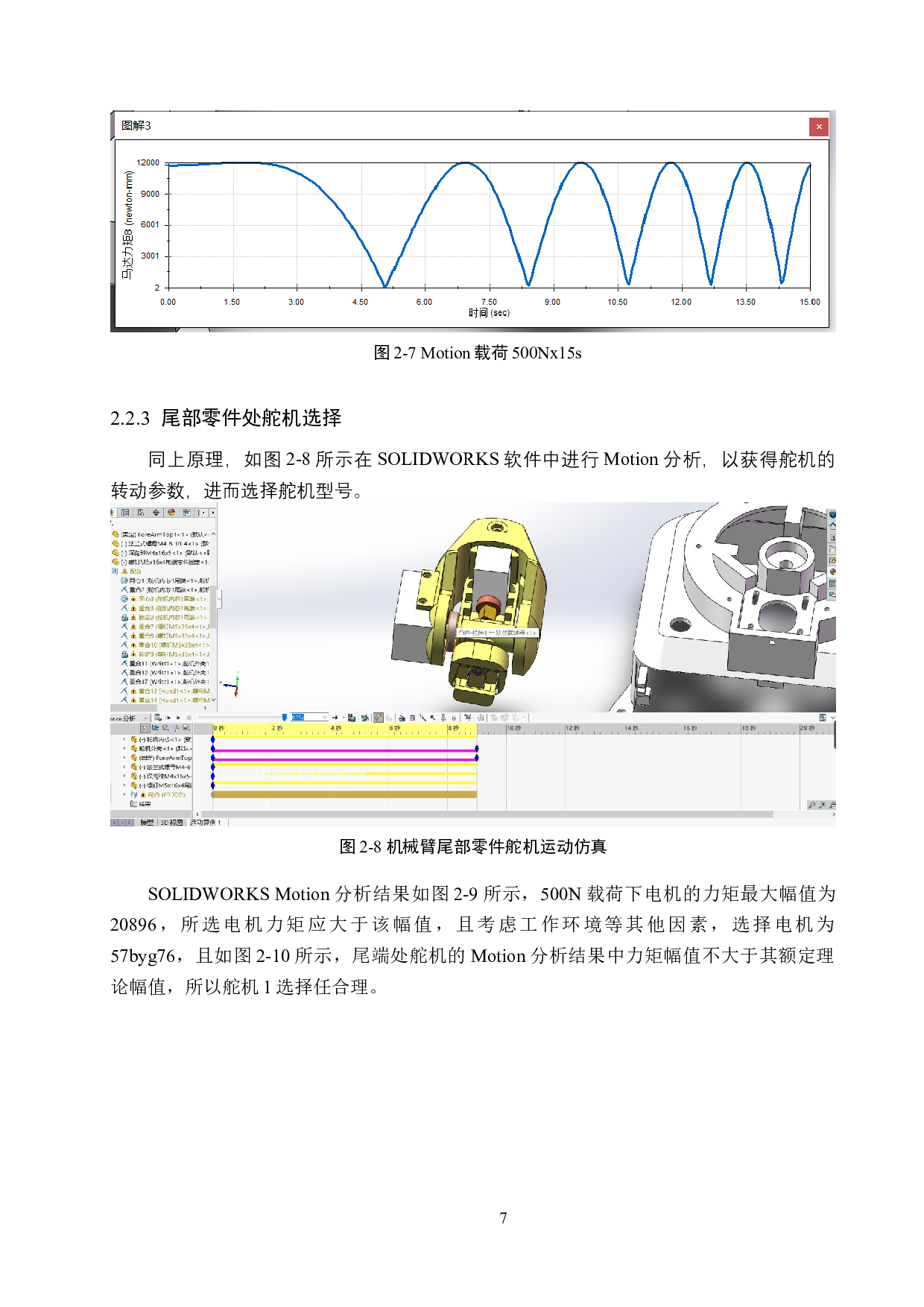
一种低成本多关节机械臂的运动学分析与结构设计-12408字.docx