





北京理工大学珠海学院本科生毕业设计(论文)
过连接在轮椅主机上的四杆机构实现各种位置。提议的目标之一是使用标准轮
椅并修改其结构。提出的方法分为四个步骤。第一种是使用创造性问题解决理
论
(TRIZ)
的分析工具来设计解决方案。其次,利用所提设计的尺寸和功能参数
对四杆机构进行了动态仿真。在静态条件下,对主要轮椅部件进行了有限元分
析。最后,利用多体仿真的方法设计了
PID
控制器。这项工作的主要贡献包括
一种轮椅的机械设计和控制,这种轮椅能够采取多种位置,直到它成为一个担
架。这一运动是由一个四杆机构产生的,
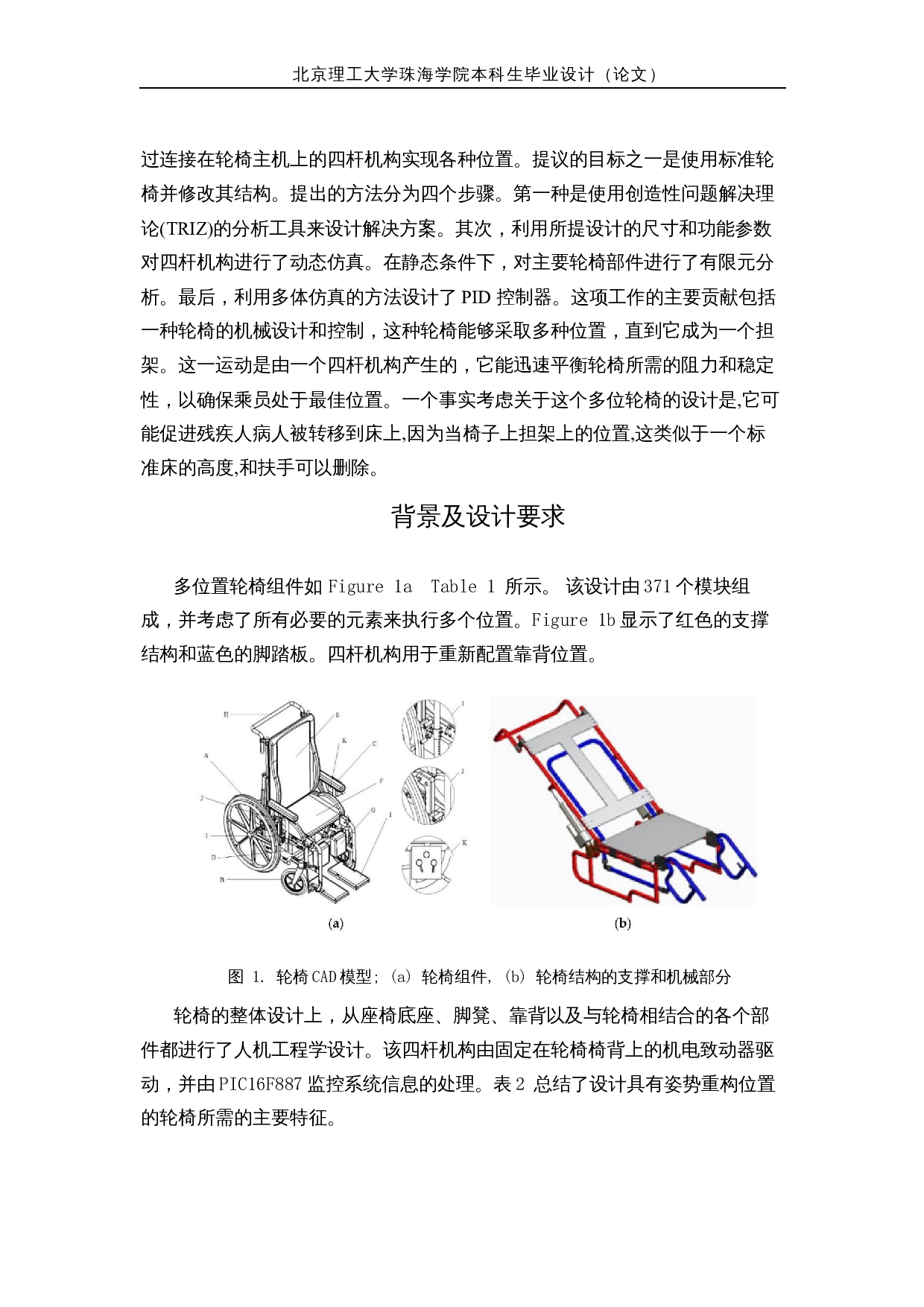
一种自动多位置动态轮椅的设计-8346字.docx