




指导教师签名:
年
月
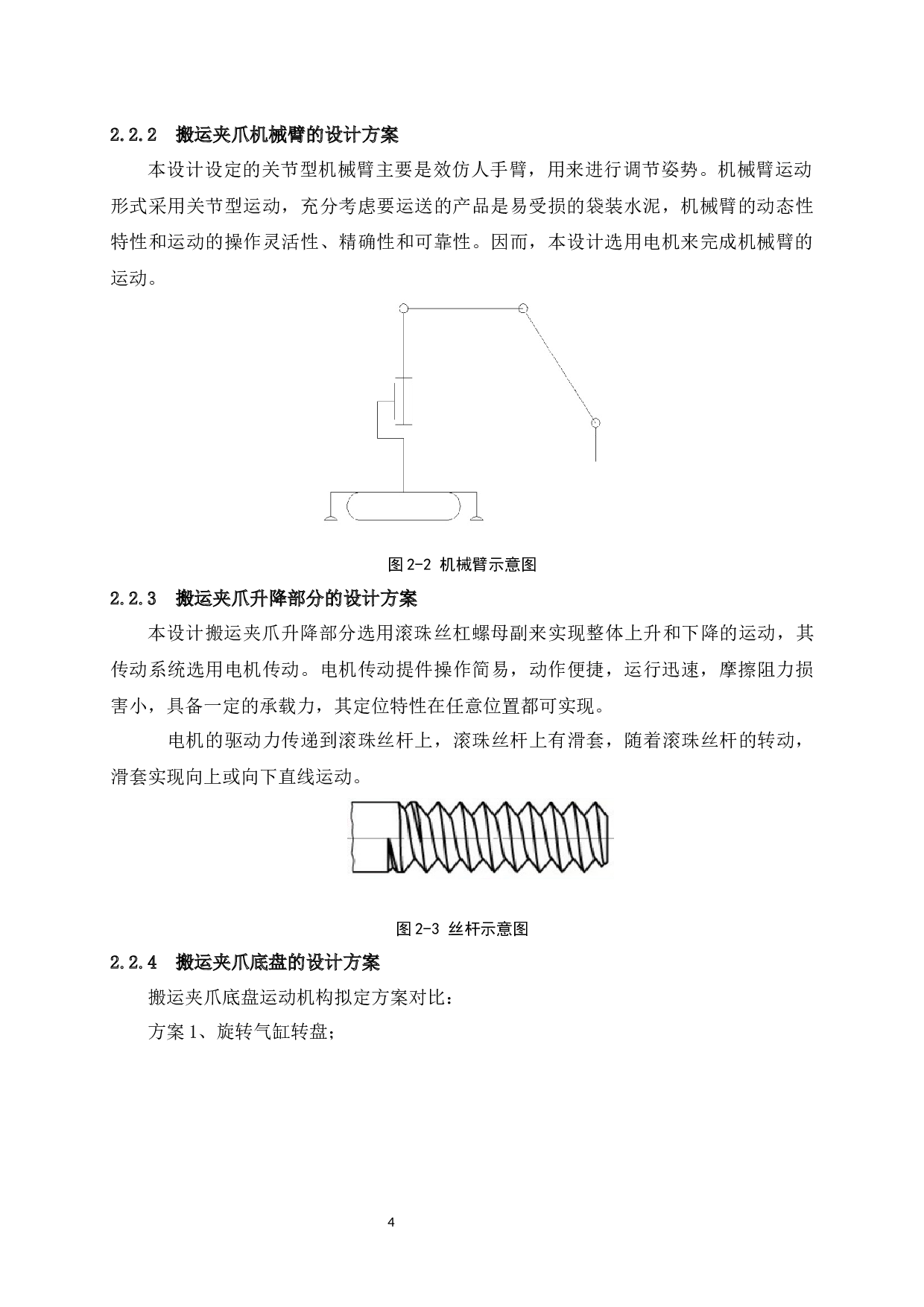
自动化产线搬运夹爪机构设计
作 者 胡 珑
指导教师
常宏斌
摘 要:
随着人工搬运成本的不断提高,越来越多的物料搬运开始采用搬运夹爪来完成。
本次毕业设计是
设计一款
移动式
的
袋装
水泥
自动化产线搬运夹爪机构
,该搬运夹爪可
通过模仿人
的
机械臂完成抓取、搬运物件。
首先,对自动化产线搬运夹爪机构各部分结构型式、驱动装置和传动方式进行了初步选型
。
其次,
结合各种已有的设计方案,在对比分析以
自动化产线搬运夹爪机构设计-11408字.docx