







【摘要
】
板球系统
是一个
典型的非线性多变量
欠驱动的
控制对象,
时常作为
检验控制
方法
的控制效果
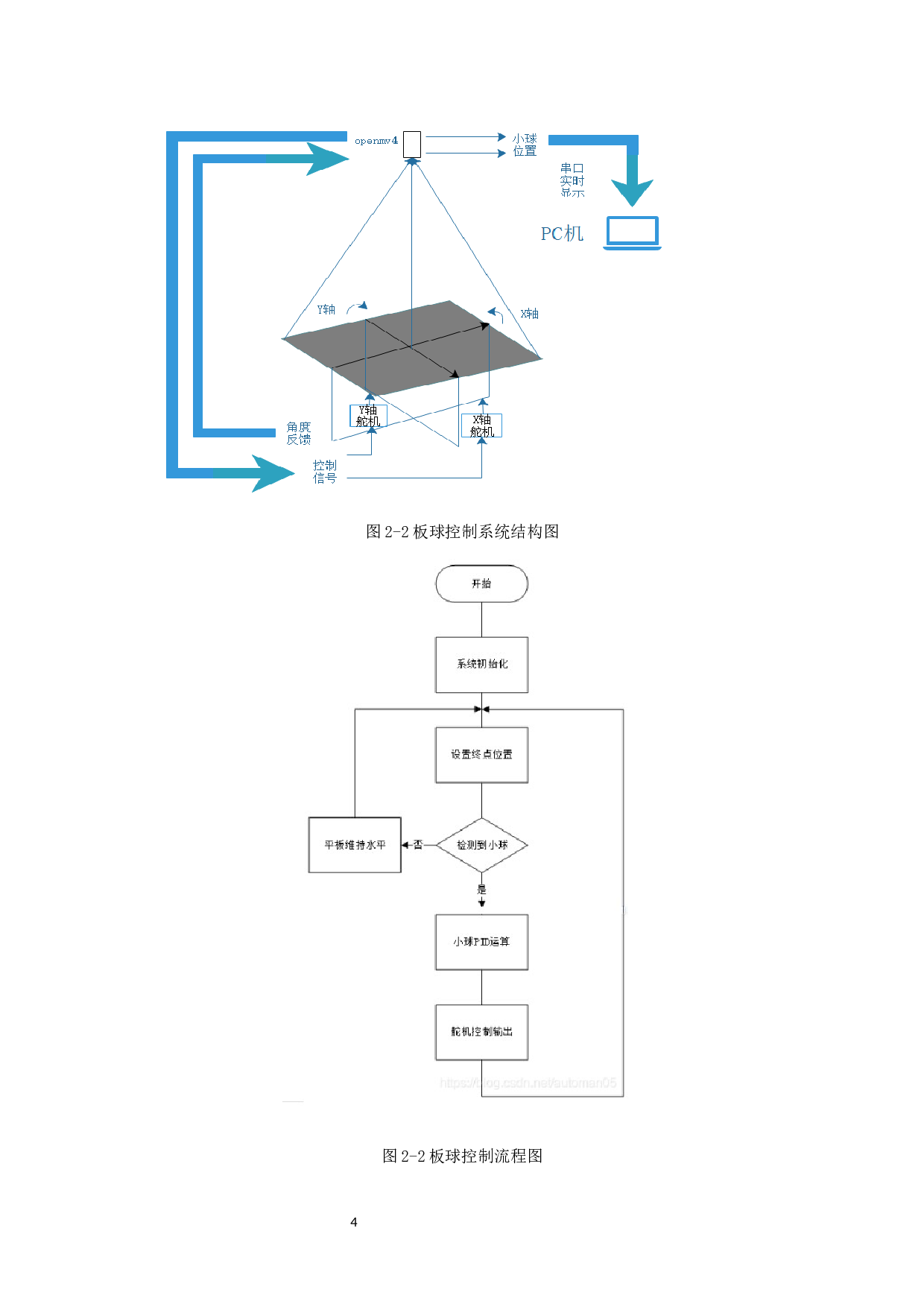
及其可行性平台。但由于板球系统机械结构要求较为复杂,设备昂贵等问题。本篇论文设计了基于经典PID控制方法,OPENMV4作为控制平台的机器视觉嵌入式系统。主要介绍了1.系统机械结构的组成及选用,2.经典控制系统理论详细说明,3.图像处理数据的基本方法,4.小球运动的近似建模。
具体过程为:小球自由放置在板子上,通过ov5640摄像头采集小球位置,通过程序小球与板的图像数据,分析获取小球位置偏差,并传送到控制器调节输出的数
基于PID的板球平衡系统的设计-15831字.docx